

Simulation Robot Laughing Expression Muscle Action Mechanism
A technology for simulating robots and action mechanisms, applied in automatic toys, entertainment, toys, etc., can solve the problems of high production cost, high cost, and not vivid and realistic expressions, and achieve the effect of low production cost and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
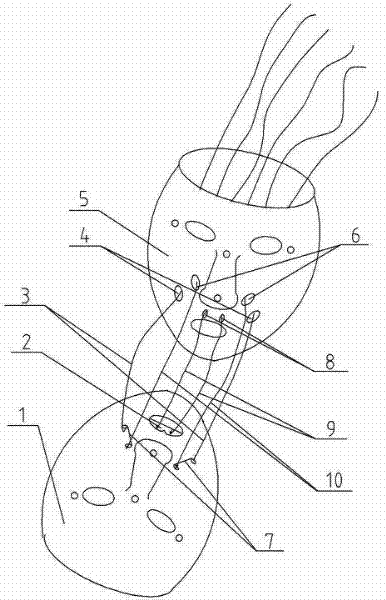
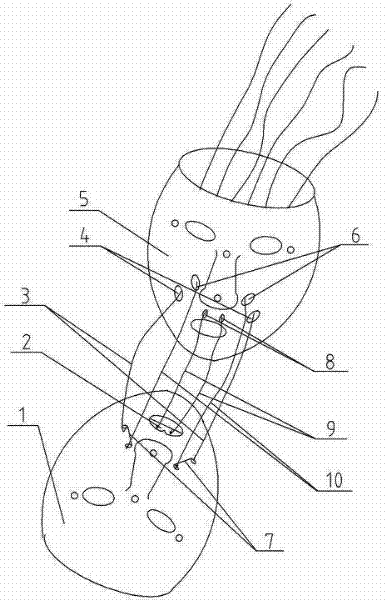
[0008] A mechanism for simulating the laughing facial muscles of a robot, including a skull shell 5, a rubber skin 1 and an action actuator. The rubber skin 1 is set on the skull shell 5, and the skull shell 5 is provided with fixing holes, eye holes and mouth holes, and the rubber skin is On the left and right nasolabial folds on 1, a metal wire 7 with rings at both ends is implanted respectively. , the other ring is at the labial groove, a lip groove 4 and alar groove 6 are formed on the upper part of the skull shell 5 corresponding to the metal wire ring position, and one end of the labial groove stay wire 3 is fixed on the ring at the metal wire labial groove, The other end passes through the lip groove 4 on the skull shell 5 and is connected with the action actuator. One end of the nose pull wire 10 is fixed on the ring at the metal wire nose, and the other end passes through the nose groove 6 on the skull shell 5 and connects with the action actuator. Connected, the meta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More