

Optimal Design and Tuning Method of Adaptive PID Controller Based on Binary Ant Colony Algorithm
An Ant Colony Algorithm, Optimal Design Technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
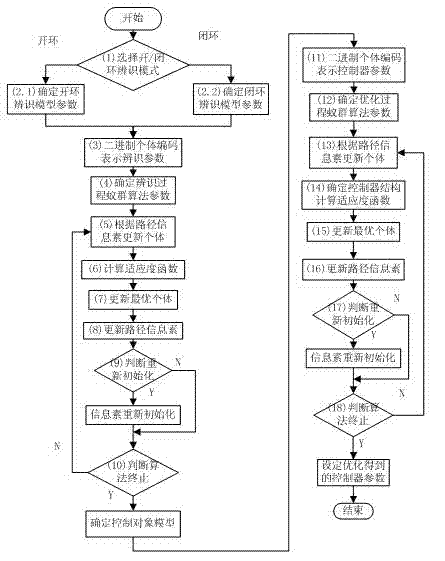
[0074] A kind of adaptive PID controller optimization design and tuning method based on binary ant colony algorithm proposed by the present invention The specific implementation steps are as follows:
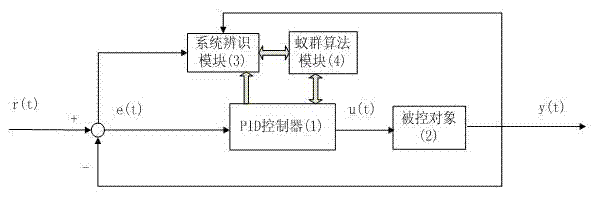
[0075] 1. Select the open-loop / closed-loop identification mode: According to the manual / automatic working status of the PID controller (1), set the open-loop / closed-loop identification mode to identify the controlled object. The difference between the open-loop and closed-loop models is that the PID controller (1) and the feedback are cut out of the control loop in the open-loop state, while the control object (2) is controlled by the PID controller (1) in the closed-loop state;
[0076] 2. Determine the open / closed-loop model identification parameters:
[0077] 2.1. Determine the identification parameters of the open-loop identification model:
[0078] In the parameter identification method block (3), the first-order inertial pure hysteresis or the second-order constant-volume...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More