

Wireless remote control intelligent terminal of mine autonomous intelligent detection multi-robot system
A smart terminal and multi-robot technology, applied in the direction of electrical program control, comprehensive factory control, etc., can solve the problems of remote control of multi-robot systems, acquisition of robot operating environment information, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
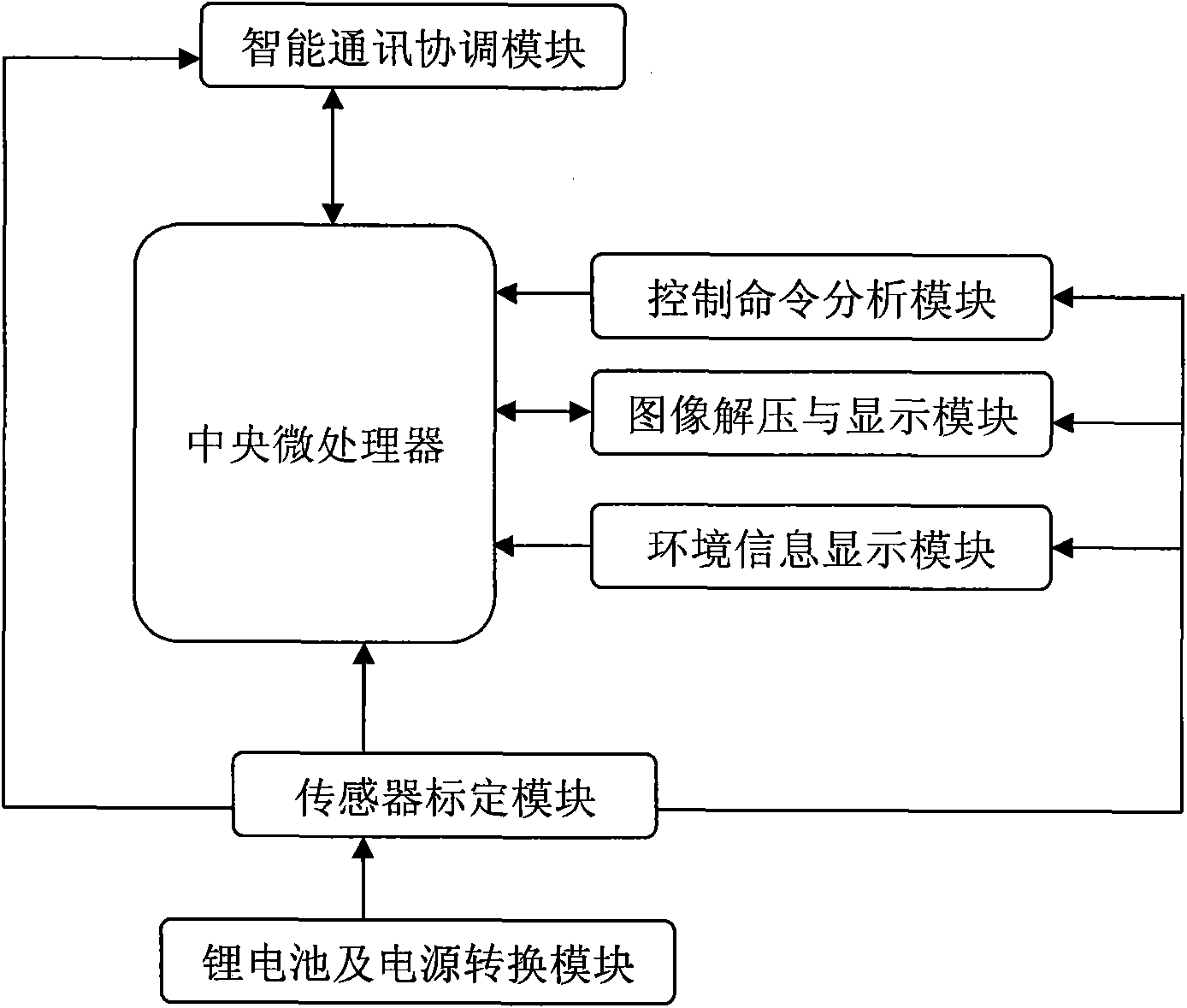
[0019] According to attached figure 1 , the structural block diagram of the wireless remote control intelligent terminal of the mine underground multi-robot system of the present invention. The terminal of the present invention mainly includes a core microprocessor 1, and the central microprocessor 1 uses an ARM11 microprocessor. The central microprocessor 1 communicates with the control button board 2 through the serial port. The central microprocessor 1 has an AD interface. The infrared gas monitoring sensor 3 amplifies its signal to a standard voltage signal through the amplifying circuit 4, and then inputs it to the AD interface of the central microprocessor 1. The wireless communication module 5 is connected with the central microprocessor 1 through the SPI port. The central microprocessor 1 has a touch liquid crystal screen driving interface, and is connected with the touch liquid crystal screen 6 through this interface.
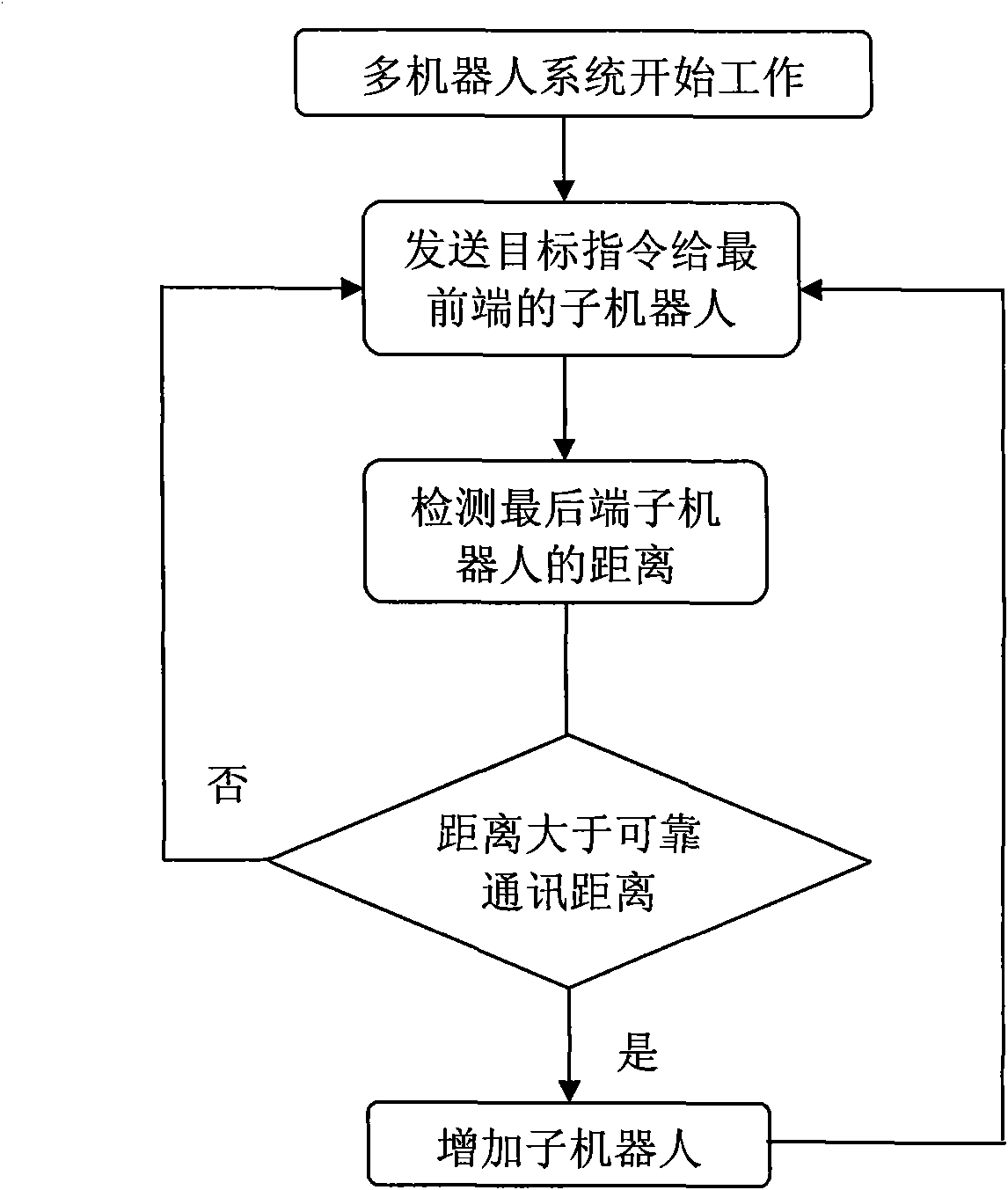
[0020] According to attached figure 2 , th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More