

Method for measuring high energy laser energy parameter based on light pressure principle and apparatus thereof
A high-energy laser and principle technology, applied in the field of high-energy laser parameter measurement, can solve problems such as difficult continuous wave high-energy laser parameter measurement, achieve wide applicability, and improve the effect of cost-effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
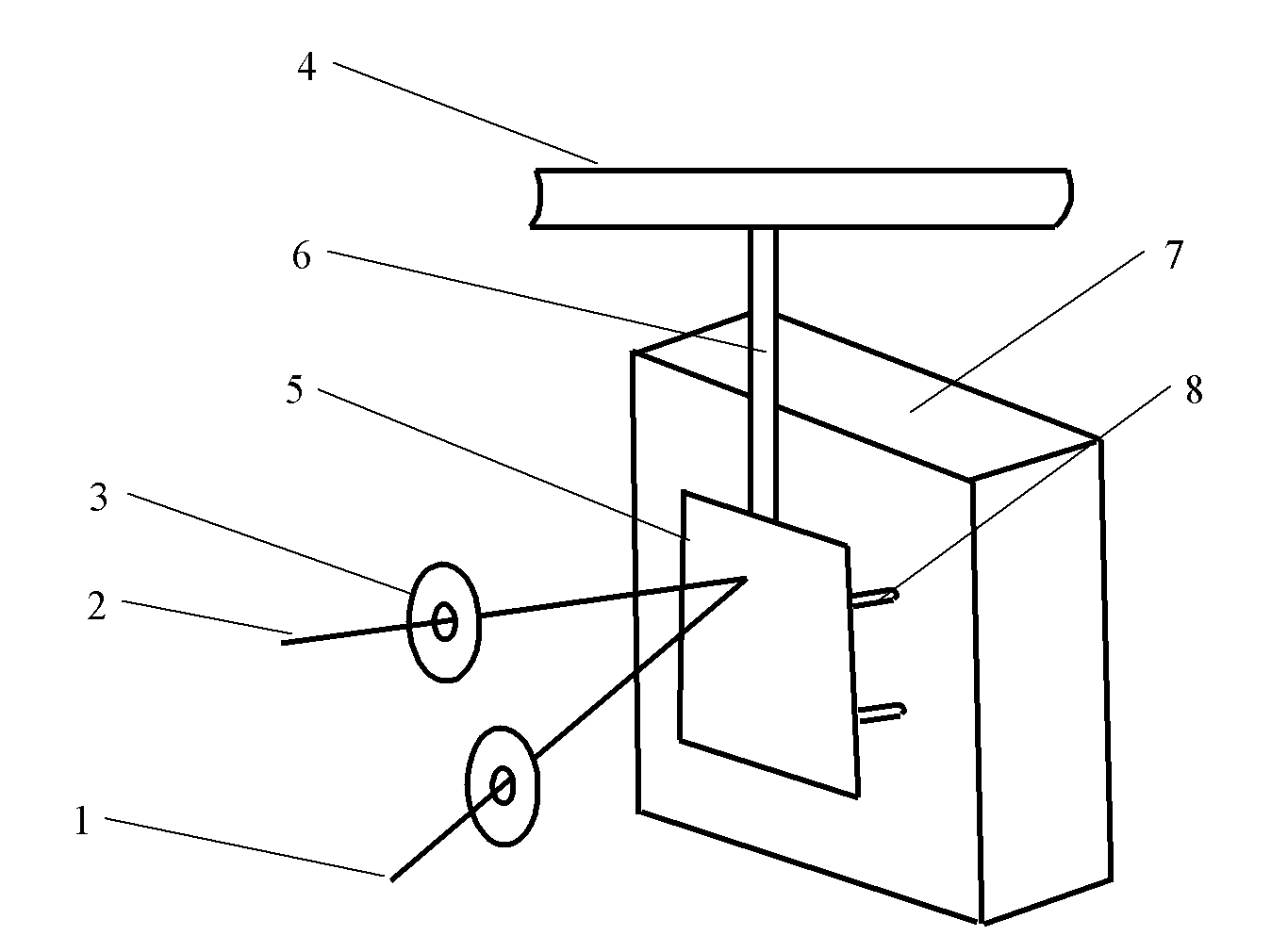
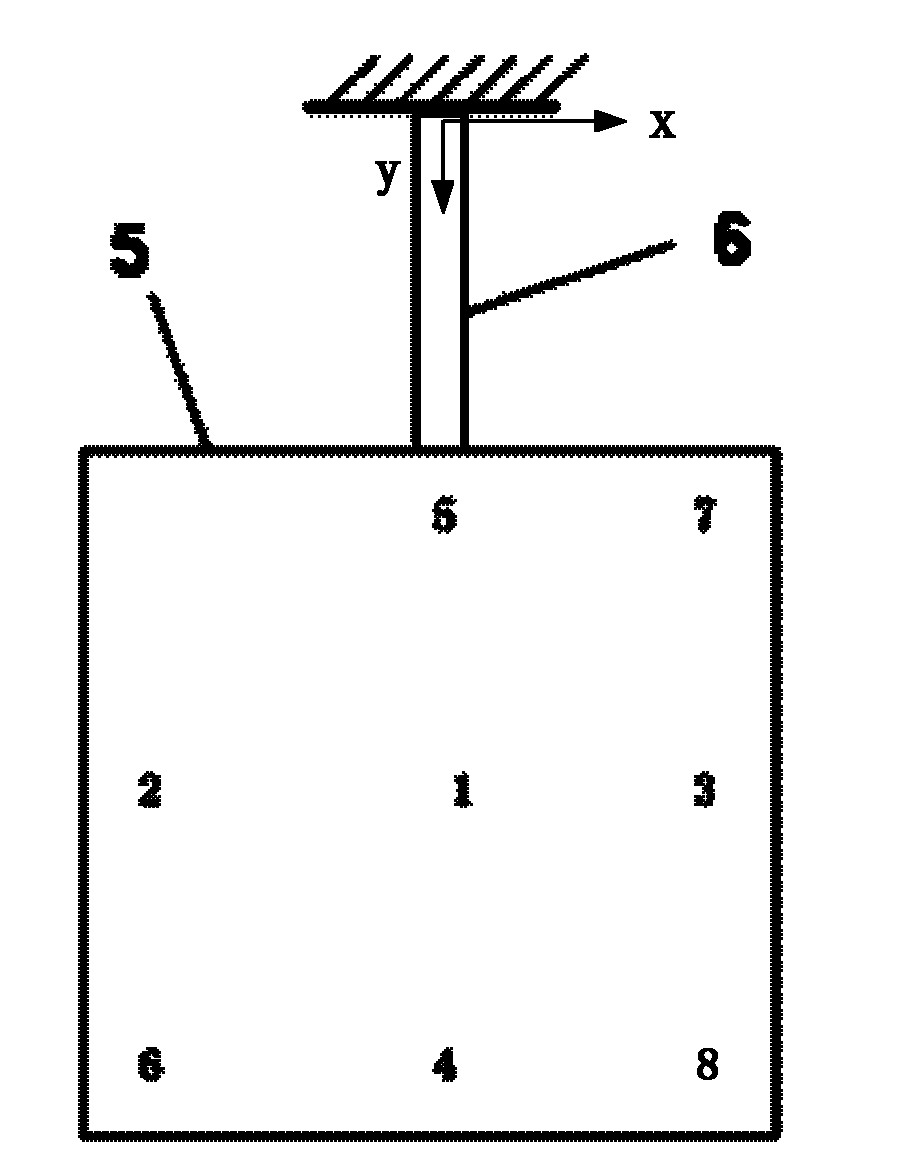
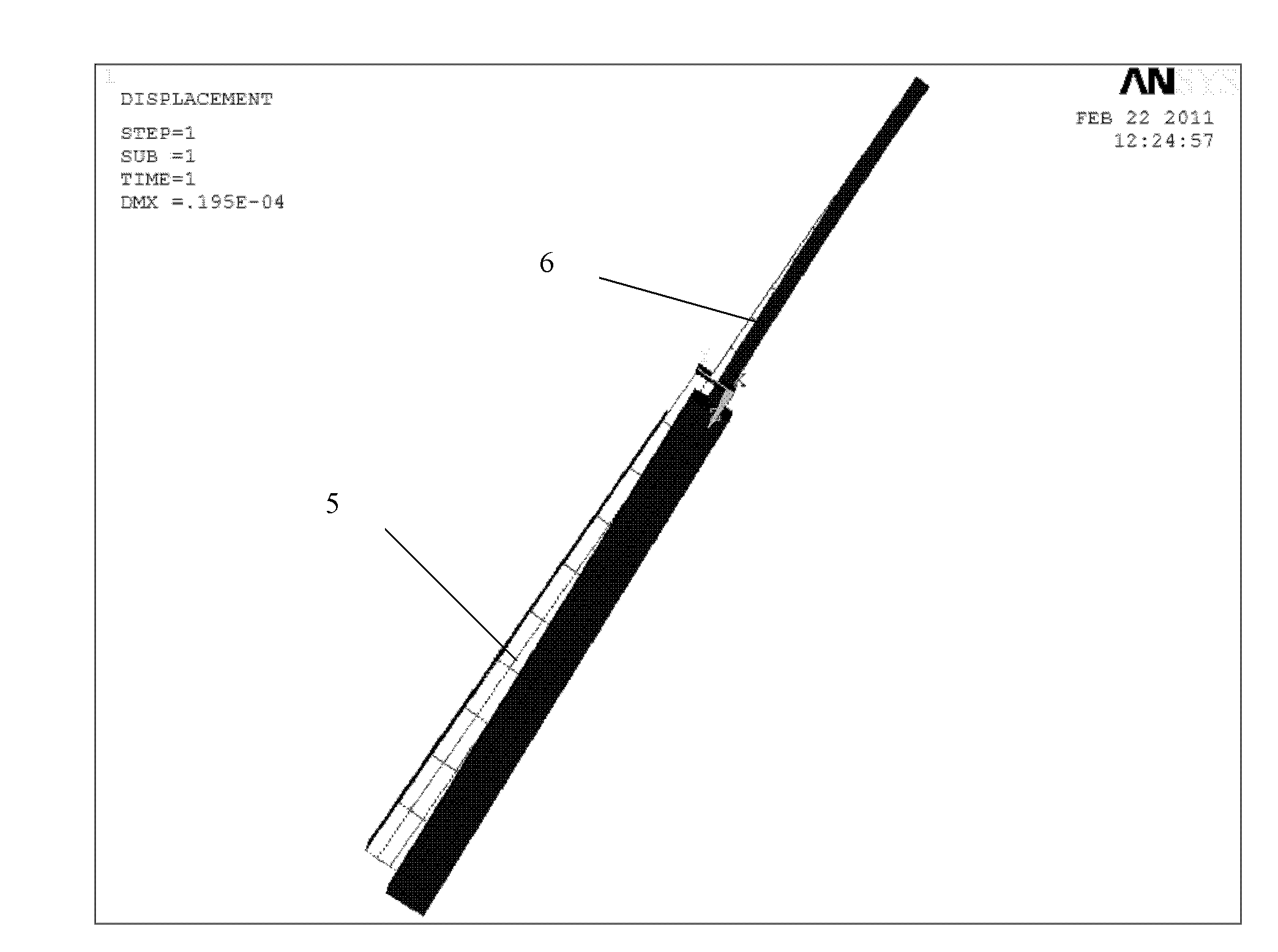
[0048] The present invention proposes a high-energy laser energy parameter measurement method based on the measurement of dynamic light pressure. The high-energy laser is incident on the reflector 5 with the deformed rod 6, and the multi-point dynamics of the reflector 5 under the laser light pressure are accurately measured. Displacement, parameters such as laser energy are calculated.
[0049] According to the classical electromagnetic field equation, it can be calculated that when light is incident on a total reflection surface, the light pressure F and light power I on the reflection surface can be expressed as
[0050] F=2·I·cosθ / c (1)
[0051] Among them: c is the speed of light; θ is the angle between the incident direction of light and the normal of the reflecting surface. For a 200kW high-energy laser, the pressure brought about by the vertical incidence to the mirror reflection is about 136 mg. If the dynamic range of the measurement system is estimated to be 100 ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More