

Robot reinforced learning initialization method based on neural network
An initialization method and neural network technology, applied in neural learning methods, biological neural network models, etc., can solve problems such as unstable algorithms and inability to objectively reflect the state of the robot's environment, so as to speed up convergence, improve learning ability, and improve learning efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
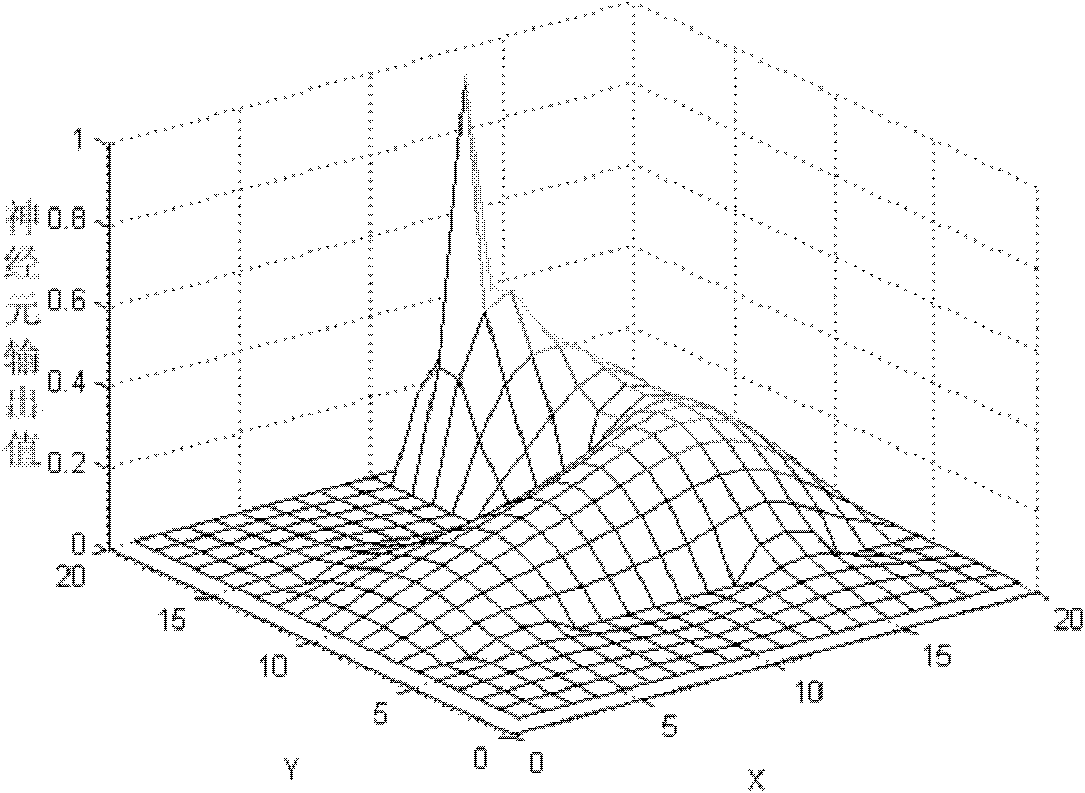
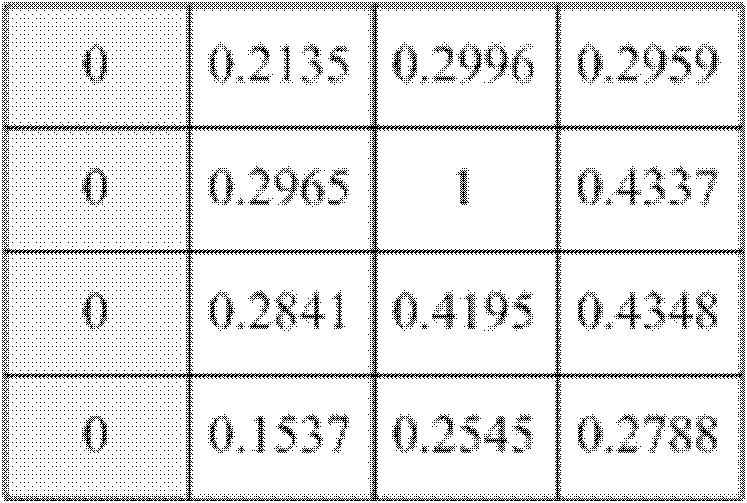
[0042] The invention initializes the reinforcement learning of the robot based on the neural network. The neural network and the robot workspace have the same topological structure. When the neural network reaches the equilibrium state, the output value of the neuron represents the maximum cumulative return of the corresponding state, and the immediate return of the current state and the The maximum discounted cumulative reward of the successor state obtains the initial value of the Q function. The prior knowledge can be integrated into the learning system through the Q value initialization, and the learning of the initial stage of the robot can be optimized, so as to provide a better learning basis for the robot; specifically, the following steps are included:
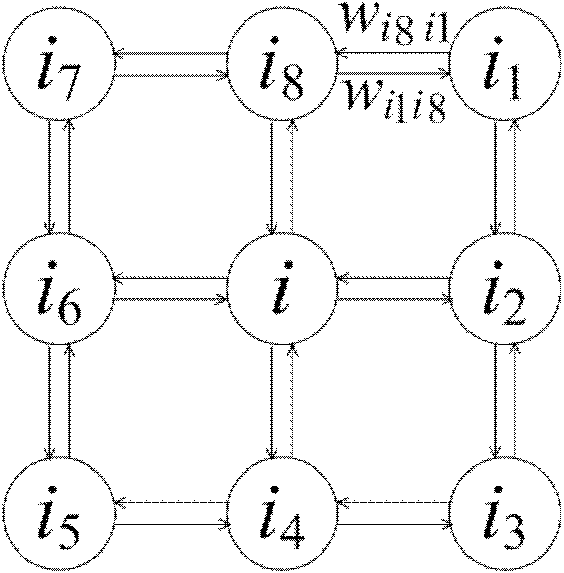
[0043] 1 Neural Network Model
[0044] The neural network has the same topology as the robot workspace, and each neuron corresponds to a discrete state of the robot workspace. All neurons are only connected to neuron...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More