

Weeding robot system and weeding method thereof
A weeding robot and weeding knife technology, applied in the field of robotics, can solve the problems of crop growth season constraints, high labor intensity, and low efficiency, and achieve the effects of avoiding pollution, reducing labor intensity, and high system integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
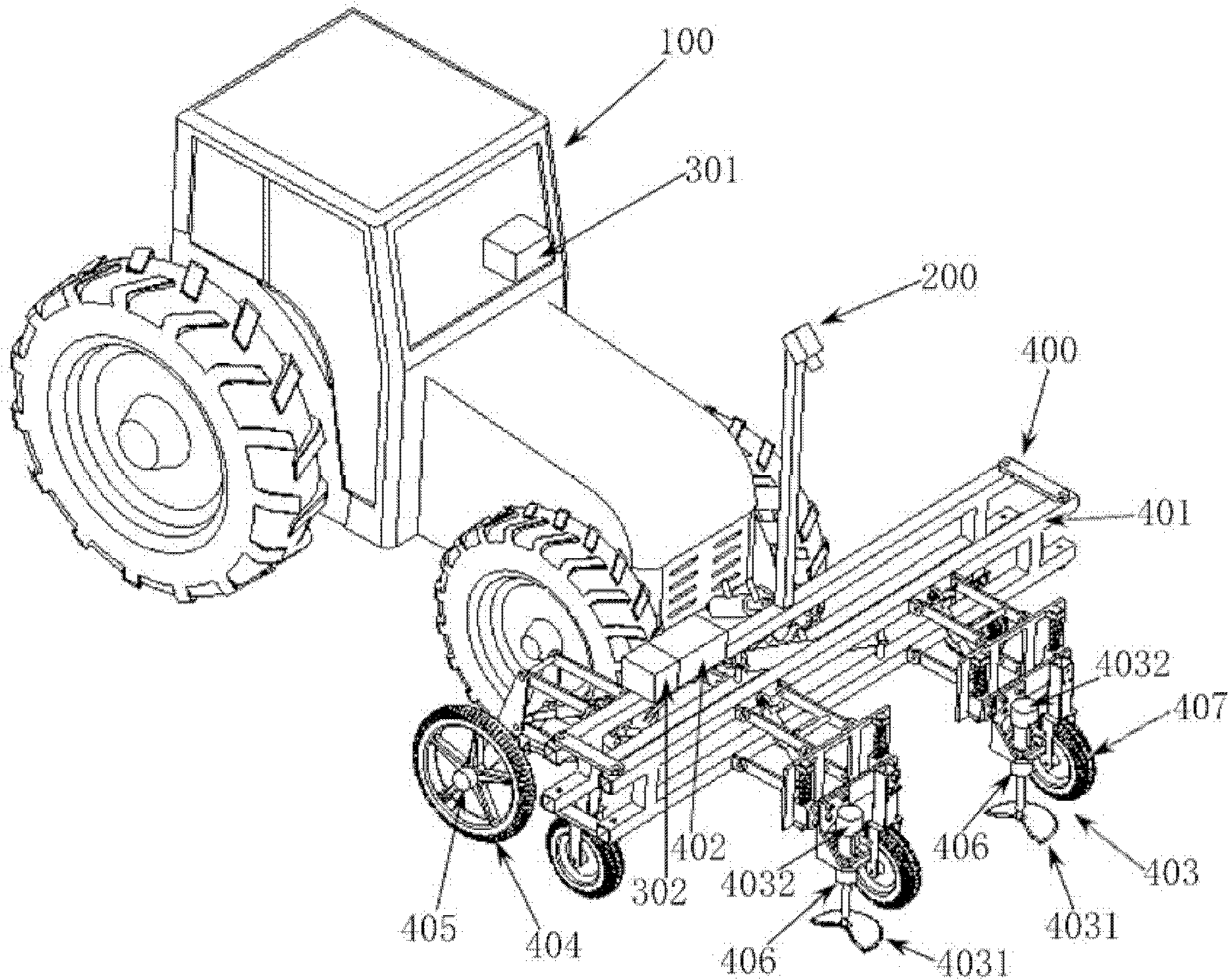
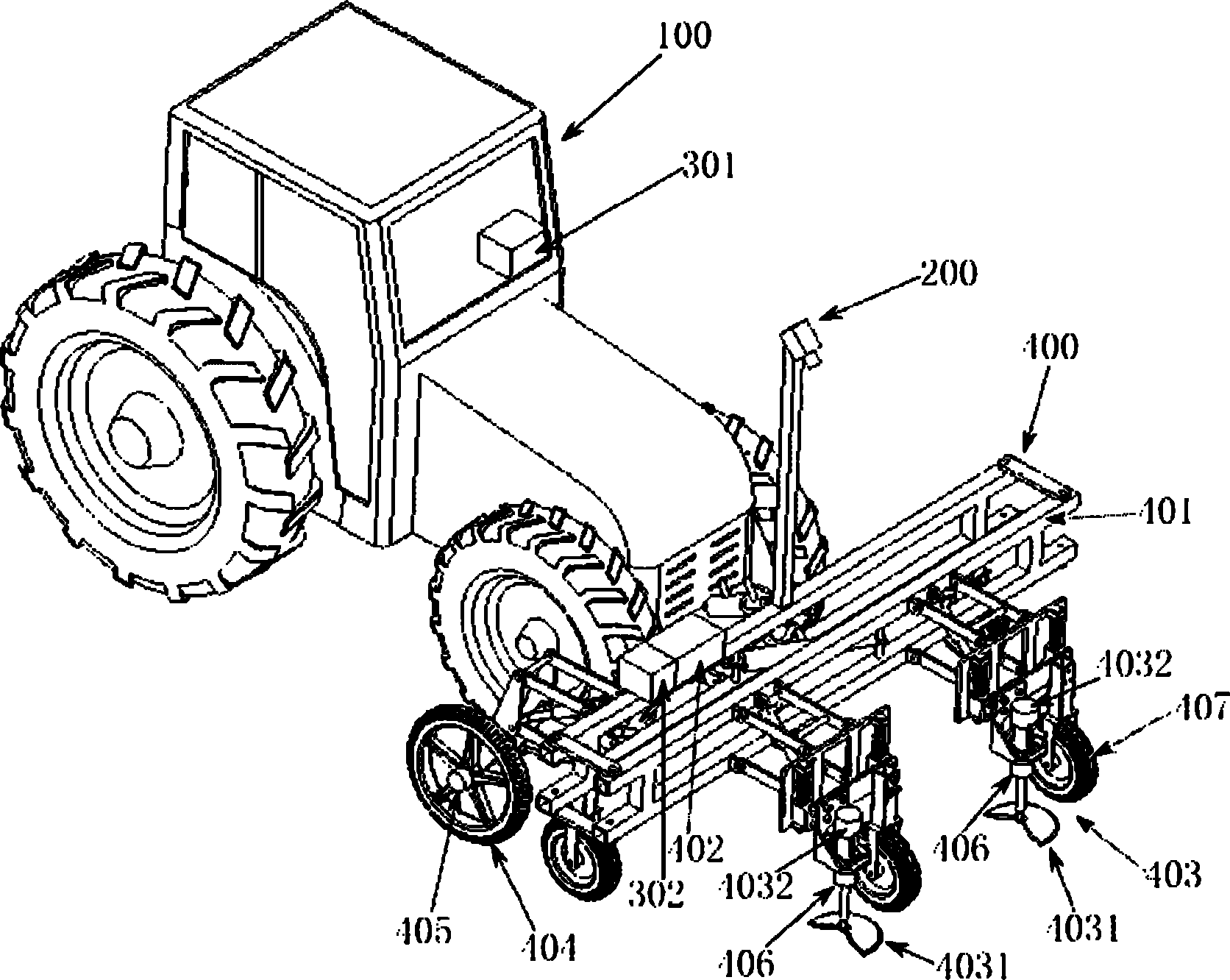
[0034] figure 1 It is a schematic diagram of the mechanical structure of the weeding robot system described in the embodiment of the present invention. Such as figure 1 As shown, the weeding robot system includes: a walking device 100 , a vision device 200 , a control device and a weeding device 400 . The shown control device further includes: an upper control unit 301 and a lower control unit 302 .
[0035] The walking device 100 is a tractor, which is used to drive the weeding robot system to walk, and hydraulically drives the weeding device 400 to weed. The upper control unit 301 is arranged in the control room of the tractor shown, the weeding device 400 is suspend...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More