

Device capable of realizing combinatorial motion output of 3PUU (three-prismatic-universal-universal) mechanism and 3UPU (three-universal-prismatic- universal) mechanism
An output device, compound motion technology, applied in manipulators, surgical robots, program-controlled manipulators, etc., can solve problems such as slow motion, redundant control systems, and hidden safety hazards, and achieve the effect of easy assembly and control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described in conjunction with the drawings and embodiments.
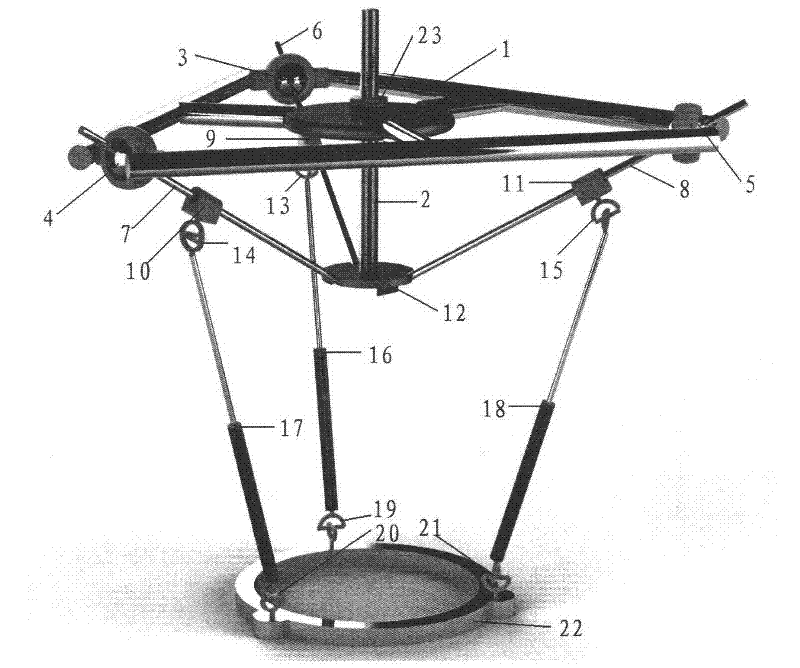
[0019] The invention uses a unique combined structure design to solve the problem that the motion output of the conventional parallel mechanism cannot meet the complex motion requirements, and increases the micro-adjustment link of the mechanism to expand the application occasions of this type of parallel mechanism. The device can realize the combined motion output of 3PUU mechanism and 3UPU mechanism, and there are mainly 3 sets of driving methods.
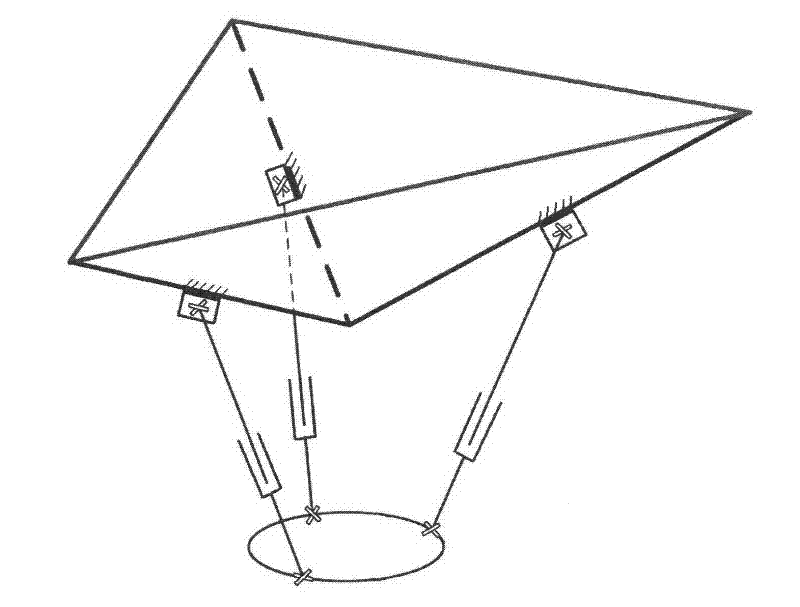
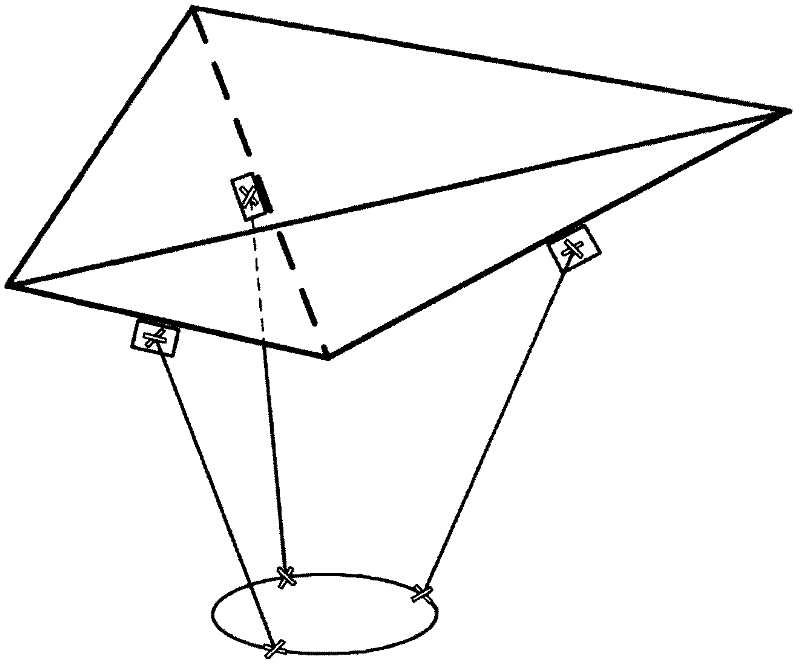
[0020] To realize the motion output of the three-degree-of-freedom 3UPU parallel mechanism, lock the slider [9][10][11], such as figure 2 As shown in , the linear drive 1 [16], the linear drive 2 [17] and the linear drive 3 [18] are the driving devices of the mechanism, and the linear drive input is realized through hydraulic pressure or ball screw; to realize three degrees of freedom 3PUU When the parallel mechanism is out...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More