

Method for optimizing performance indexes of different layers of redundancy mechanical arm simultaneously
An optimization method and technology of robotic arms, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of speed divergence, non-zero final state speed, difficulty in considering acceleration limit and torque limit, etc. Easy-to-use effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings.
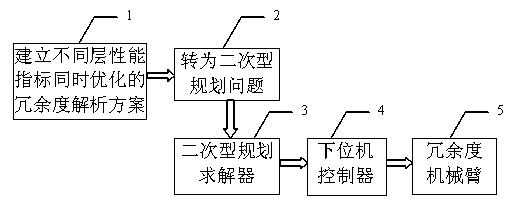
[0022] figure 1 The simultaneous optimization method of different layers of performance indicators of a redundant manipulator is mainly composed of establishing a redundancy analysis scheme for simultaneous optimization of different layers of performance indicators 1, converting it into a quadratic programming problem 2, a quadratic programming solver 3. It consists of a lower computer controller 4 and a redundant mechanical arm 5.
[0023] First, according to the performance indicators of different layers that need to be optimized, a corresponding redundancy analysis scheme is established by introducing weight adjustment factors; then, the scheme is transformed into a A unified quadratic programming problem; thereby constructing a corresponding quadratic programming solver (such as a quadratic programming numerical algorithm) to solve the problem; finally, the soluti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More