

Hopping robot based on structure of bi-mass model
A model structure, robot technology, applied in the direction of motor vehicles, transportation and packaging, etc., to achieve the effect of simple and reliable energy release mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
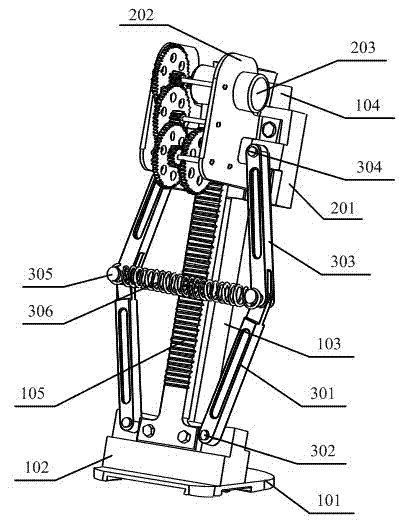
[0034] In the present invention, a bottom mechanism for supporting the function is installed on the bottom of the body; a top mechanism for driving the function is installed on the top of the body; and an intermediate leg connection mechanism for energy storage and release is installed.
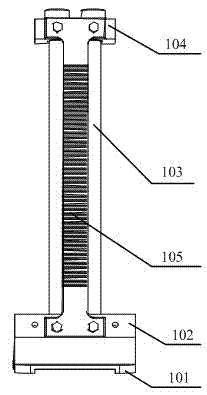
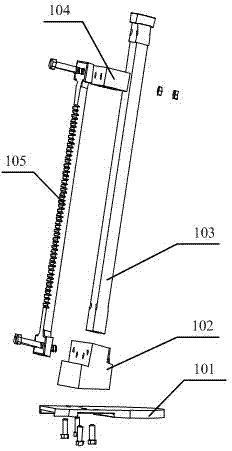
[0035] Such as figure 1 , figure 2 , image 3 with Figure 5Shown, this jumping robot foot plate 101 upper surfaces are drilled with 4 through holes, and the inclined block 102 lower surfaces are drilled with through holes near the central position, and the holes on the upper surface of the foot plate 101 are connected with the inclined block 102 lower surfaces with screws, and the inclined blocks Two holes are symmetrically opened on the upper surface of 102 near the center, and two guide rail shafts 103 are inserted into these two holes. The two ends of the bar have through holes respectively, wherein the hole at one end is connected with the inclined block and the guide rail shaft 103 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More