

Physical modeling-based robot obstacle avoidance path planning method
A path planning, robot technology, applied in two-dimensional position/channel control and other directions, which can solve problems such as inconsistent with robot movement habits, obstacle collision, and robot movement danger.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
[0045] In view of the insufficient consideration of the safety gap between the robot itself and obstacles in the current robot obstacle avoidance path planning, the present invention incorporates the distance information and the gravitational information of moving objects and obstacles in the working area into the dual grid information map, Make the planned path more practical, simple, intuitive and easy to implement.
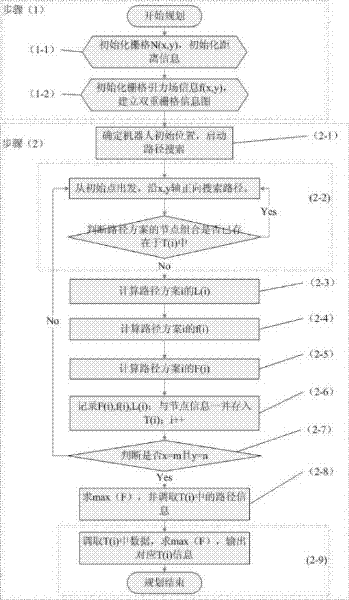
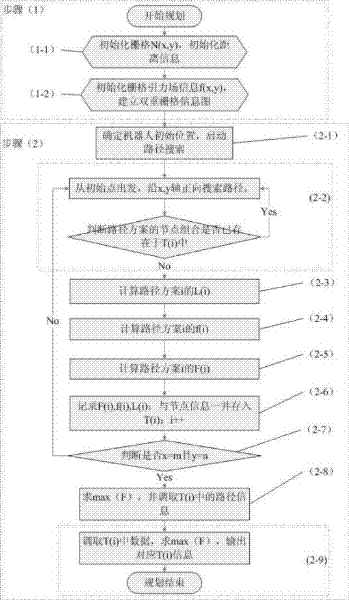
[0046] like figure 1 Shown, a kind of robot obstacle avoidance path planning method based on physical modeling of the present invention, its steps are as follows:
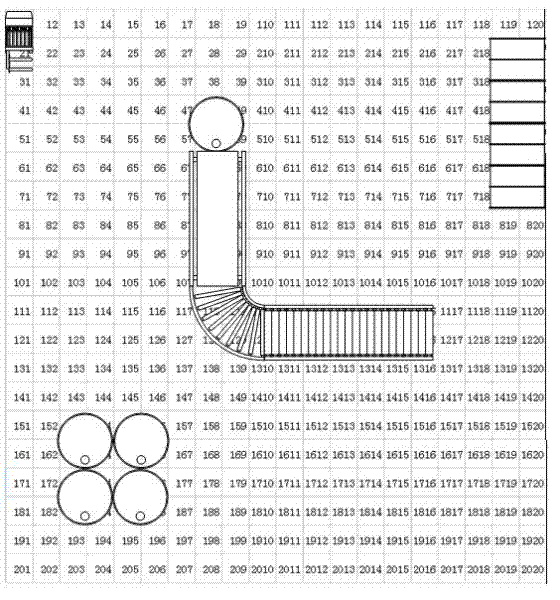
[0047] (1) Set up the gravitational information grid and the distance information grid of the robot's working area, and establish the dual grid information map of the robot, such as figure 2 As shown, the details are as follows;
[0048] (1-1), initialize the gri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More