

End effector of novel harvesting robot and flexibility control method thereof
A technology of an end effector and a control method, applied in the field of harvesting robots, can solve the problems of poor operation effect, low degree of automation and intelligence, and achieve the effects of enhancing grasping flexibility and reliability, improving operation effect and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
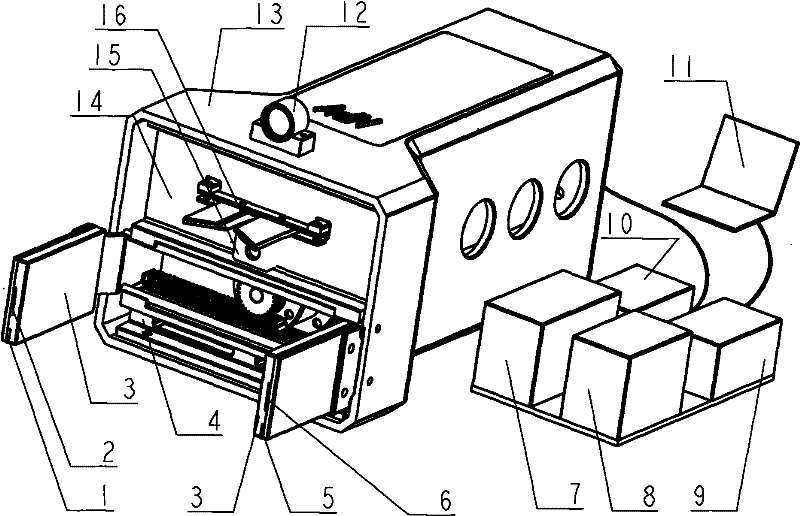
[0011] A new type of harvesting robot end effector ( figure 1 ) is composed of a mechanical system, a control system, a perception system and a power supply system, wherein the mechanical system is composed of a finger grasping mechanism (3), a stem separation mechanism (16) and a supporting mechanism (4, 13 and 14); the control system is composed of a computer (11), motion controller (9), driver (10), electromagnetic clutch (3-6 and 16-4), electromagnetic brake (3-5) and miniature DC servo motor (3-7); Power supply system consists of The lithium battery pack (7) is composed of a voltage transformation and voltage stabilization module (8); the perception system is composed of pressure sensors (1, 2, 5 and 6), a camera (12) and a distance sensor (15).
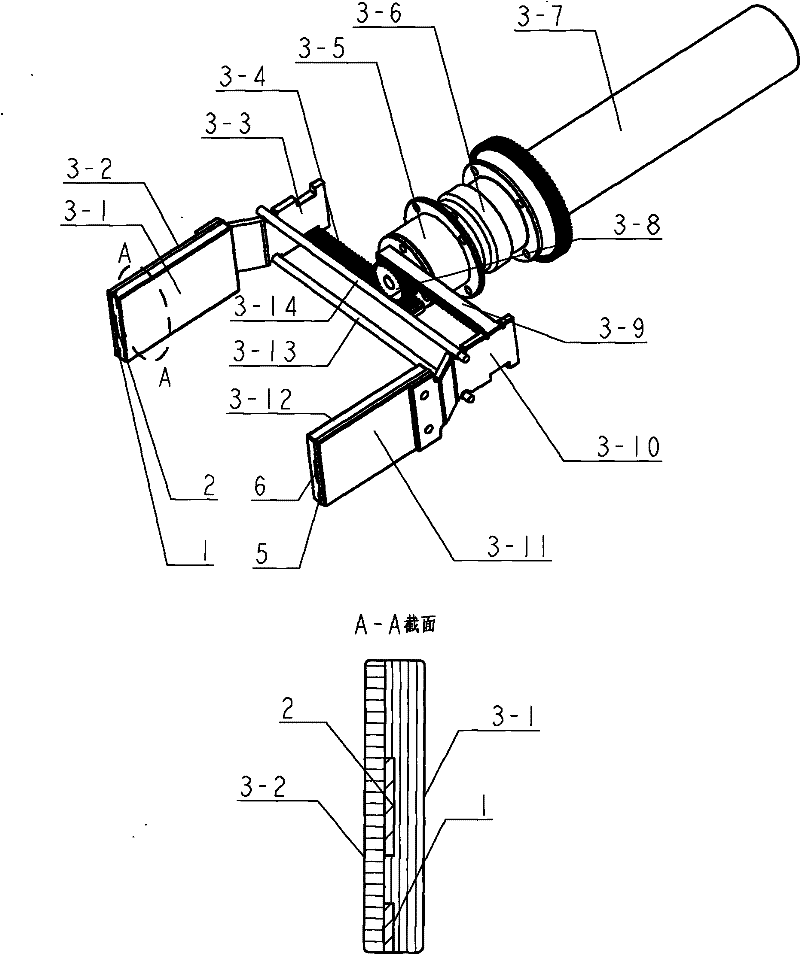
[0012] Finger gripping mechanism (3) such as figure 2 As shown, including left finger sponge pad (3-1), left finger (3-2), connecting plate (3-3 and 3-10), rack (3-4 and 3-9), gear (3- 8), right finger (3-11), right finger sp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More