

Recovery walking aiding robot
A walking aid robot and microcomputer technology, which is applied in the direction of equipment to help people move around, physical therapy, etc., can solve the problems of high user flexibility, simple motor function, and difficulty in rehabilitation of walking aid robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] Below in conjunction with accompanying drawing and embodiment the present invention is further described:
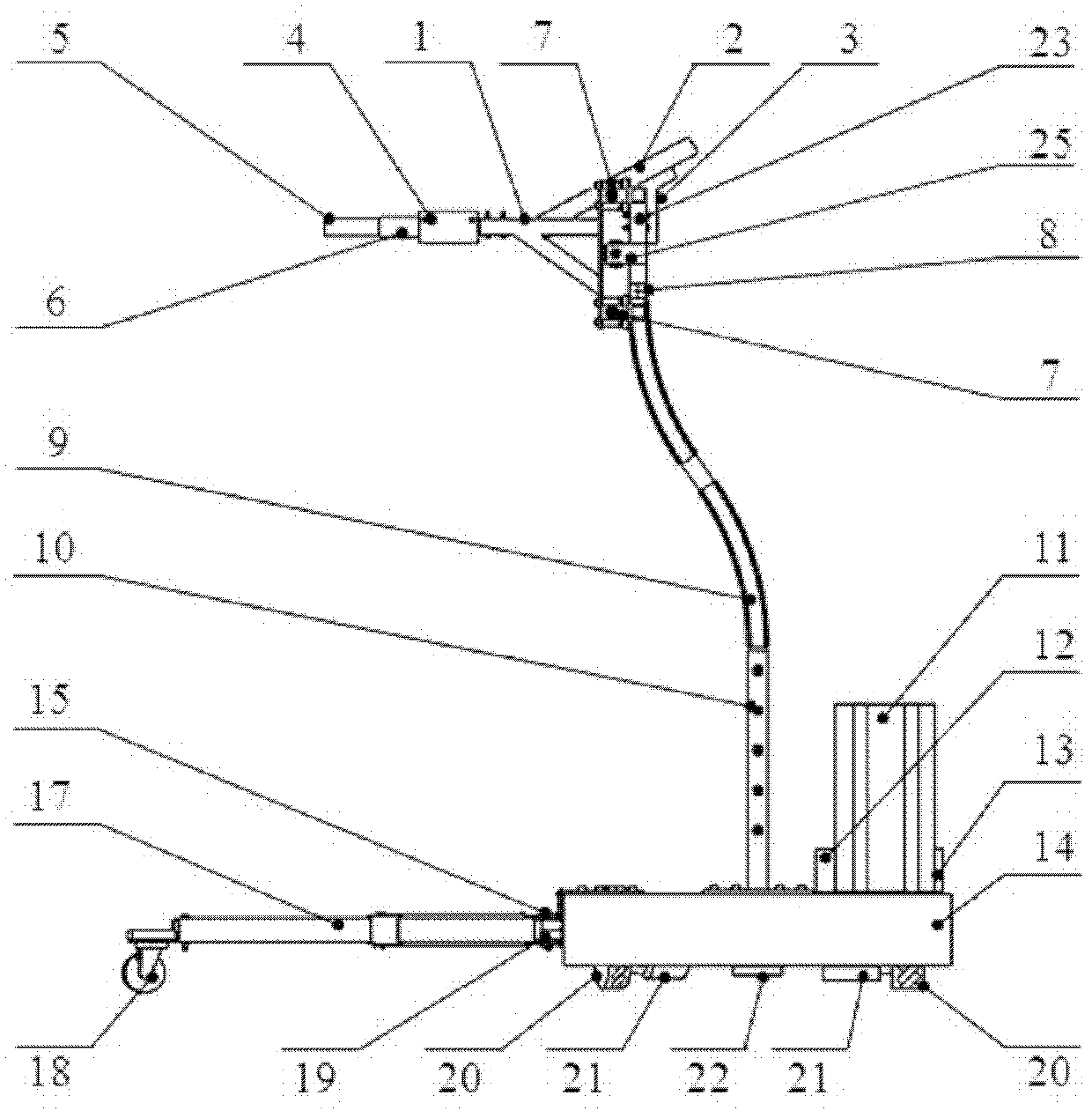
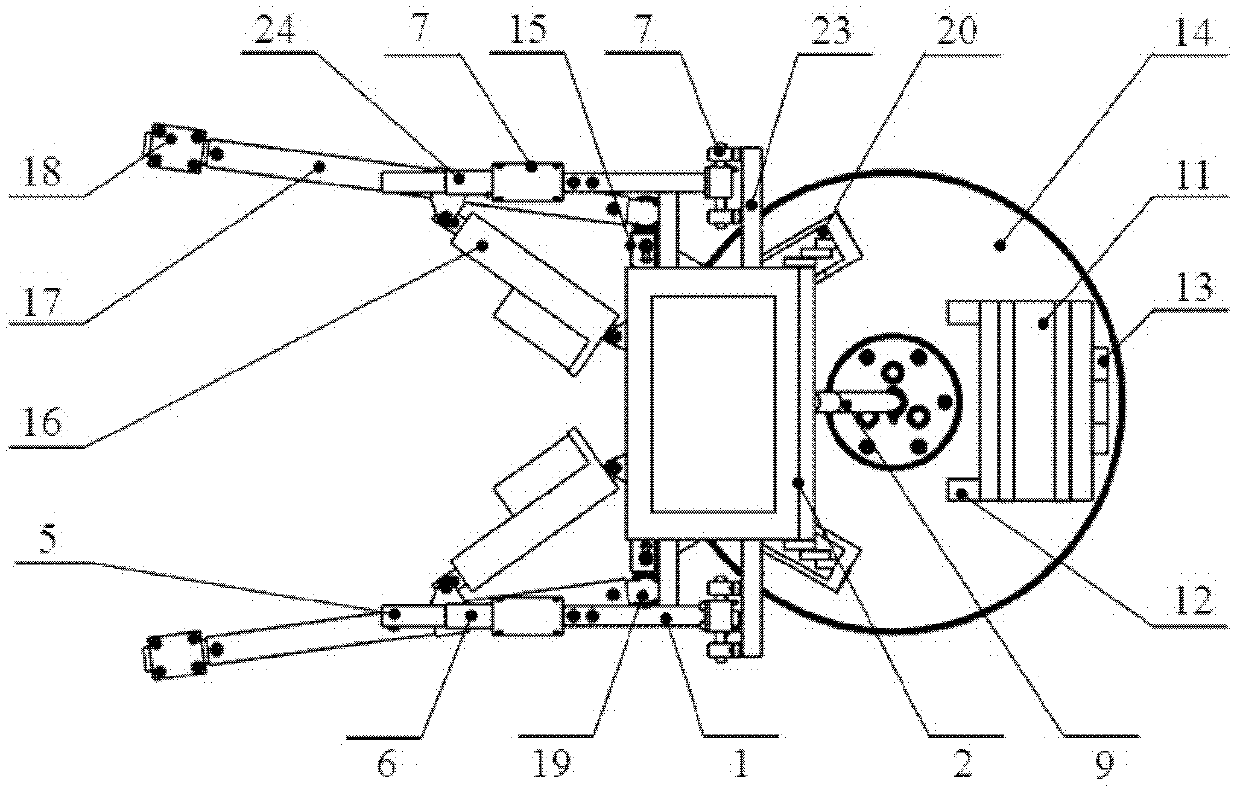
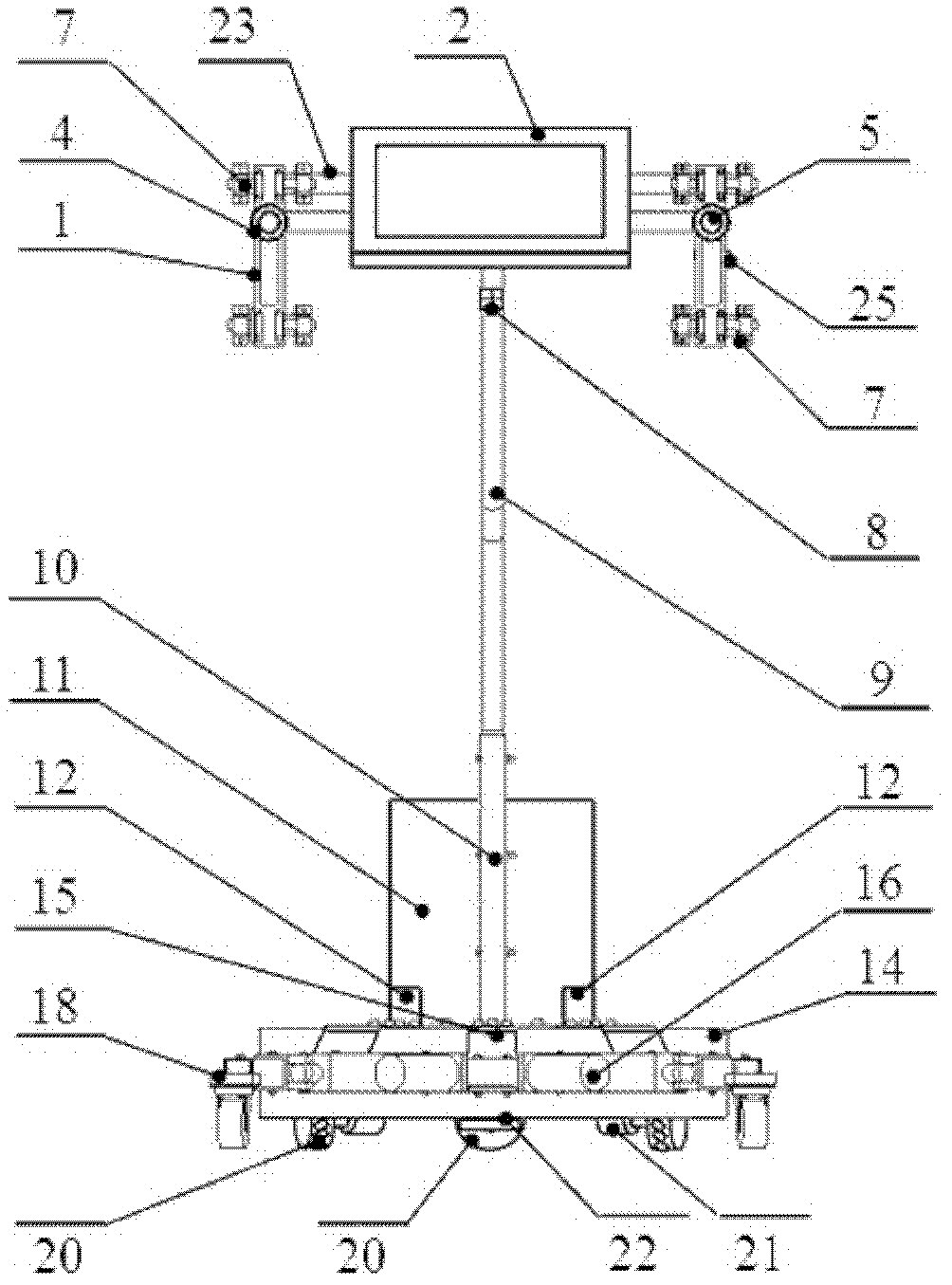
[0061] Such as figure 1 , figure 2 , image 3 As shown, the embodiment of the present invention includes an armrest frame 1, a connecting frame 23, a tablet microcomputer 2, an S-shaped support bar 9 and a chassis 14;
[0062] The armrest frame 1 is a U-shaped frame, and the two ends of the U-shaped frame are respectively connected to the armrest push rod 5 through the armrest sleeve 4, and a left pull pressure sensor 24 is housed between the armrest sleeve 4 on the left and the armrest push rod 5, and the right side A right-pull pressure sensor 6 is installed between the armrest sleeve 4 and the armrest push rod 5; the connecting frame 23 is a vertically placed rectangular frame, and the armrest frame 1 connects with the connecting frame 23 on its four sides through four horizontally placed linear bearings 7. fixed on the two apexes; a side pull pressure sens...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More