

Tracking method for mechanical arm tail end trajectory of robot
A trajectory tracking, robotics technology, applied in manipulators, manufacturing tools, etc., can solve problems such as slow calculation speed and large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described below in conjunction with the accompanying drawings and specific embodiments.
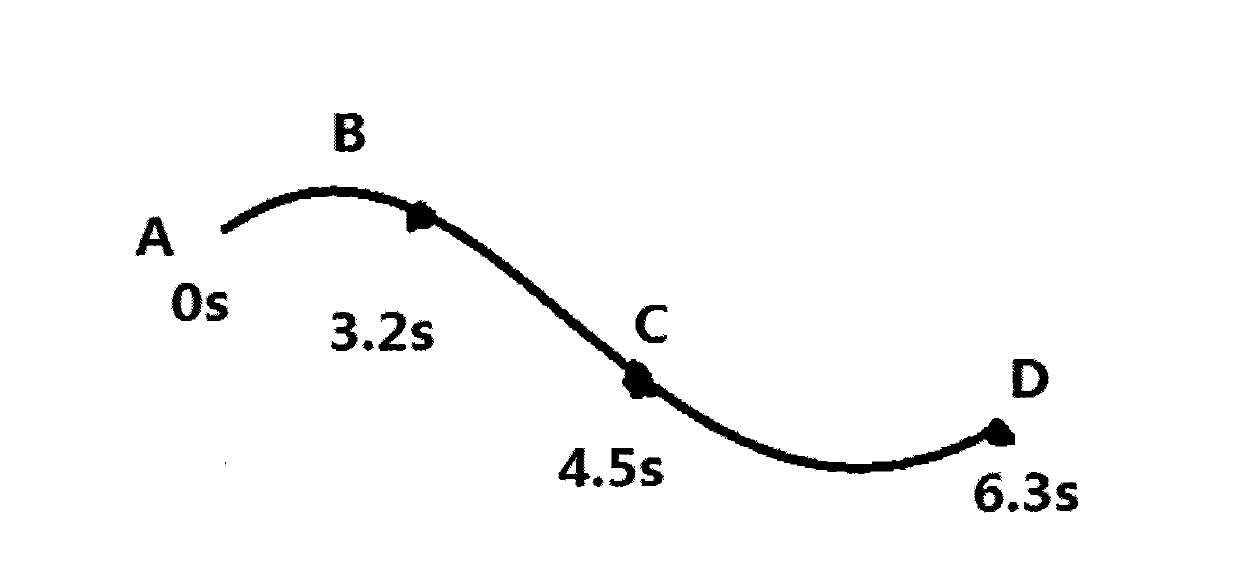
[0048]Since directors and other practitioners in the camera industry generally do not have the professional knowledge in the field of robot motion control, users usually can only give rough basic information, which includes the end of the robot manipulator preset by the user (for camera robots, other The end of the manipulator is the running trajectory of the camera), including: the key points that the camera will reach when it is moving, the time to reach these key points, and the attitude of the camera at the position of the key points. as in figure 1 A schematic diagram of the motion trajectory preset by the user for the camera robot before shooting is given in . Utilizing these information can not directly control the camera robot to move according to the preset track, what the method of the present invention needs to do is to obtain the accelerat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More