

Method for controlling dynamic surface of flexible joint mechanical arm
A dynamic surface control, flexible joint technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problem of non-matching uncertainty, differential explosion and other problems that cannot be solved for flexible joint robotic arms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach ( 1
[0107] Step 1: Analysis and construction of the control system model of the flexible joint manipulator
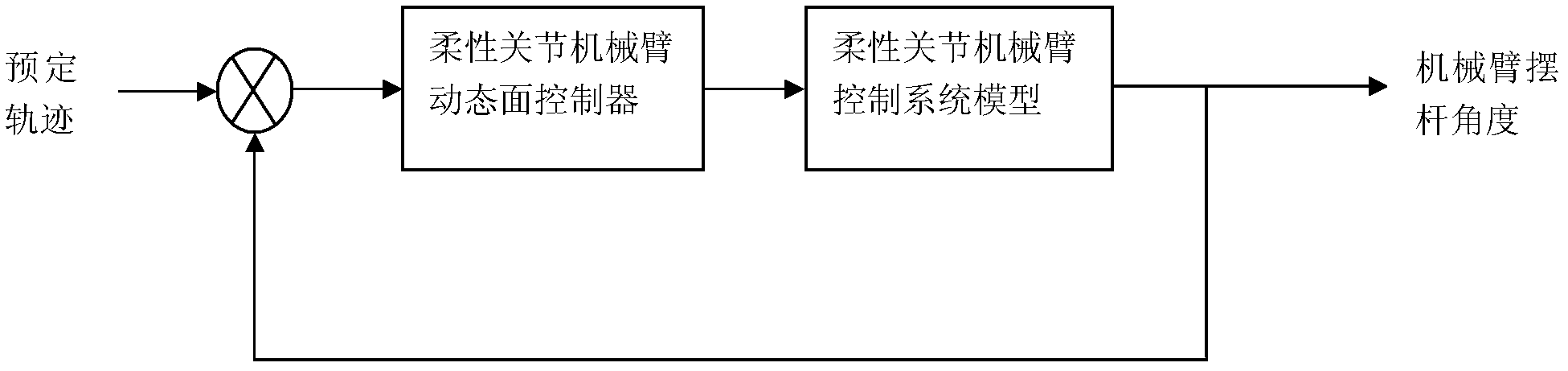
[0108] The closed-loop control system adopts a negative feedback control structure to output the angle of the swing rod of the flexible joint manipulator. The designed closed-loop control system is mainly composed of two parts: the controller link and the system model. The structural layout is shown in figure 2 shown.
[0109] Control system model of flexible joint manipulator I q · · + K ( q - q m ) + Mgl sin q = 0 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More