

Data fusion method and device for low-cost integrated navigation system
An integrated navigation system and data fusion technology, which is applied in the data fusion field of low-cost integrated navigation systems, can solve the problems of low precision, low precision, and low MEMS gyroscope precision, and achieves high robustness and strong adaptive ability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0021] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention more clear, the method and device for discriminating pulse signals of the present invention will be clearly and completely described below in conjunction with the accompanying drawings.
[0022] Embodiment one
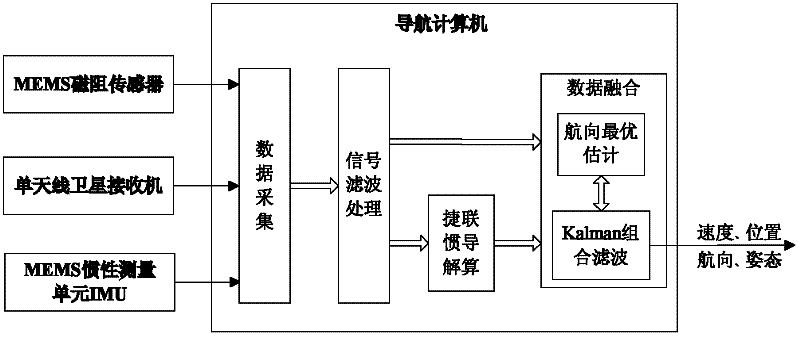
[0023] The structure of the low-cost integrated navigation system provided by the embodiment of the present invention is as follows: figure 1 As shown, it is mainly composed of MIMU, MEMS magnetoresistive sensor, single-antenna satellite receiver and navigation computer. The navigation computer completes multi-sensor data acquisition, signal processing, strapdown inertial navigation solution, data fusion (including heading optimal estimation and combined Kalman filter) and other processing. The above-mentioned satellite receiver may be a GPS satellite receiver or a satellite receiver of the Beidou navigation system.
[0024] Based on the above-mentioned...
Embodiment 2
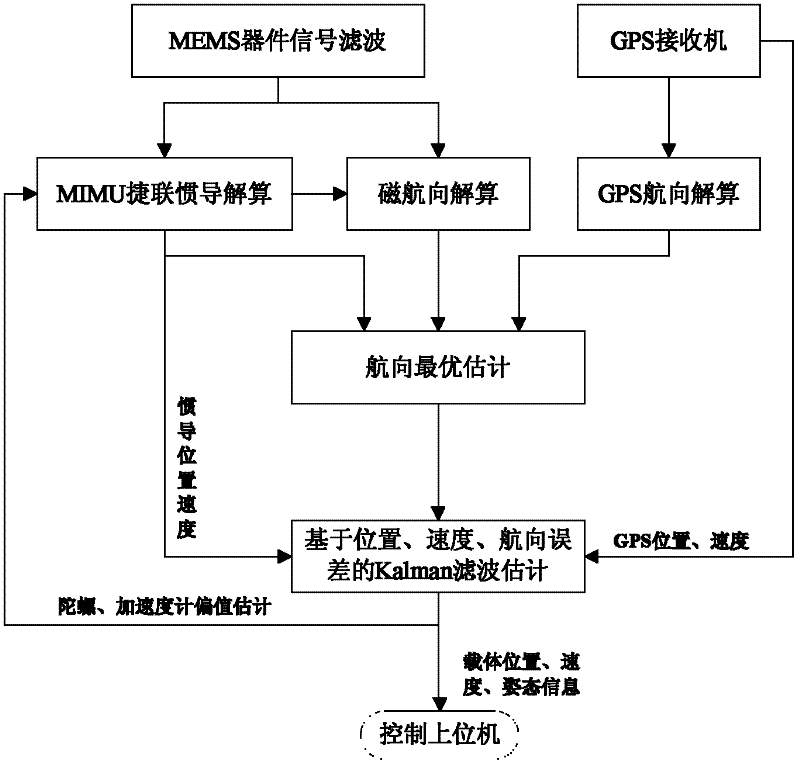
[0153] This embodiment provides a data fusion device in a low-cost integrated navigation system, the data fusion device is set in the figure 1 In the navigation computer in , its specific structure is as follows Figure 6 As shown, the following modules are included:
[0154] The MEMS inertial device heading calculation module 61 is used to perform strapdown inertial navigation calculation according to the output data of the micro inertial measurement unit in the integrated navigation system to obtain the heading ψ of the carrier I , Calculate the heading ψ of the carrier according to the output data of the magnetoresistive sensor in the integrated navigation system m , According to the output data of the satellite receiver in the integrated navigation system, the heading ψ of the carrier is obtained G ;
[0155] The carrier final heading calculation module 62 is used to optimize the estimated performance index according to the set heading of the carrier, and calculate the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More