

Robot protocol implementation method based on Ethernet
A protocol implementation, robotic technology, applied in data exchange through path configuration, digital transmission systems, electrical components, etc., can solve the problem of remote control, inability to meet requirements, transmission speed that cannot reach control speed and transmission of large data volumes requirements and other issues to achieve the effect of improving operational safety, high real-time performance, and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
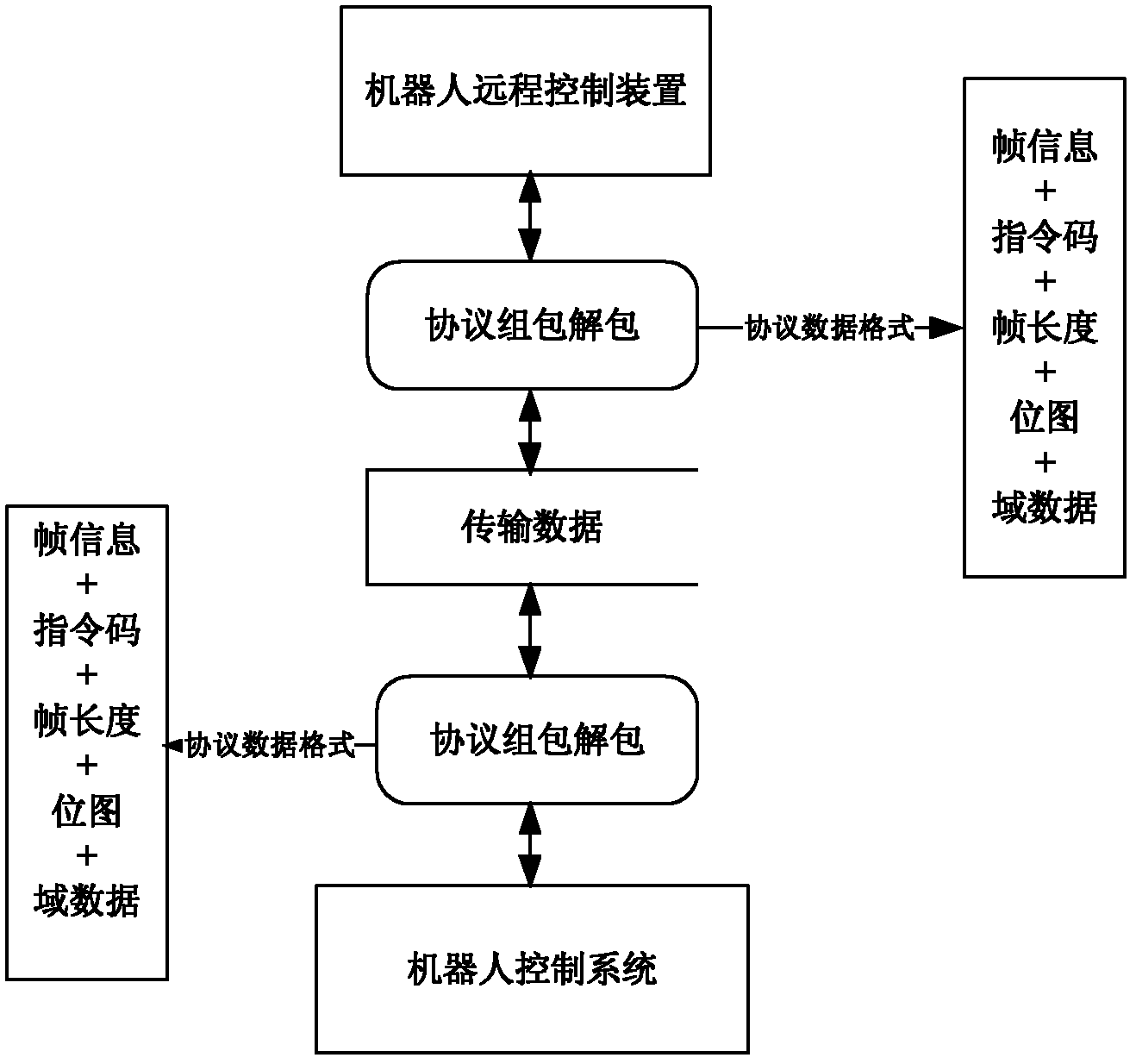
[0041] This embodiment is based on an Ethernet robot protocol implementation method; a data communication protocol format is provided for the robot remote control device and control system, figure 1 This is the organization chart of the protocol in this embodiment, the control system is used as the server, and the remote control device is used as the client. The data frame of this protocol is composed of frame header and field data, and the frame header is composed of frame information, instruction code, frame length and bitmap. Frame information consists of index number, frame type, and number of frame fields. The instruction code is used to represent various control commands for communication between the remote control device and the control system. The frame length is used to represent the data frame length. The bitmap is used to represent 64 fields. Contains various parameters and transmission control quantities of the robot. Domain data is the data required for command c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More