

Stereo vision rapid navigation and positioning method based on double trifocal tensors
A technology of stereo vision, navigation and positioning, applied in image data processing, instruments, computing and other directions, can solve the problem of low positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0061] In order to make the technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0062] 1. Extract the BRISK feature points of the current frame left and right images of the stereo camera video stream, and obtain the image coordinates of the BRISK feature points of the current frame left and right images (u L,k , v L,k ) and (u R,k , v R,k ). The left image has a total of n 1 BRISK feature points, the right image has a total of n 2 A BRISK feature point; extract the U-BRISK descriptor on the corresponding image coordinate position;
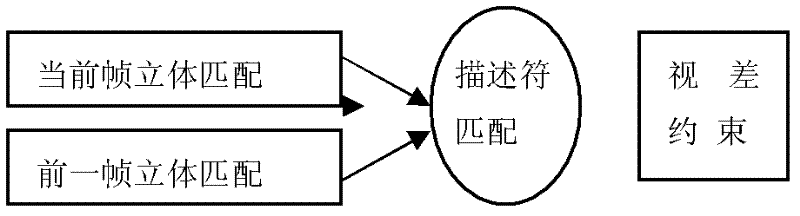
[0063] 2. Take any feature point U-BRISK descriptor in the first image of the current frame, and the feature point U-BRISK descriptor in the second image within the parallax threshold range (0, 60), and calculate the distance between the two Hamming distance, if the Hamming distance is less than the threshold 80, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More