

Automatic needle-feeding mechanism of medical robot
A robotic and automatic technology, applied in the fields of medical science, surgical instrument parts, surgery, etc., can solve the problems of large volume, inability to adapt to the surgical space, and lack of clinical practicability, achieving the effect of easy replacement and ensuring safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
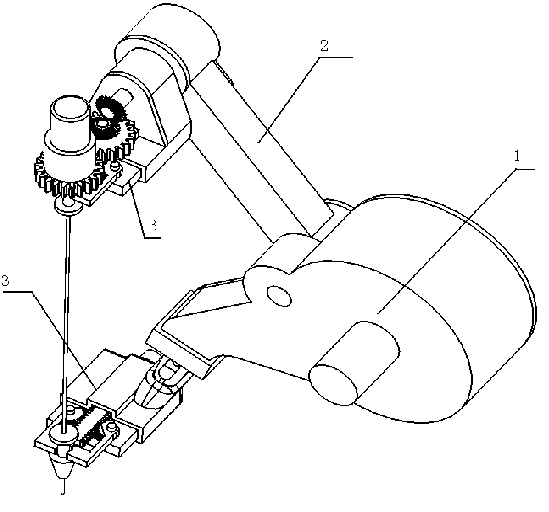
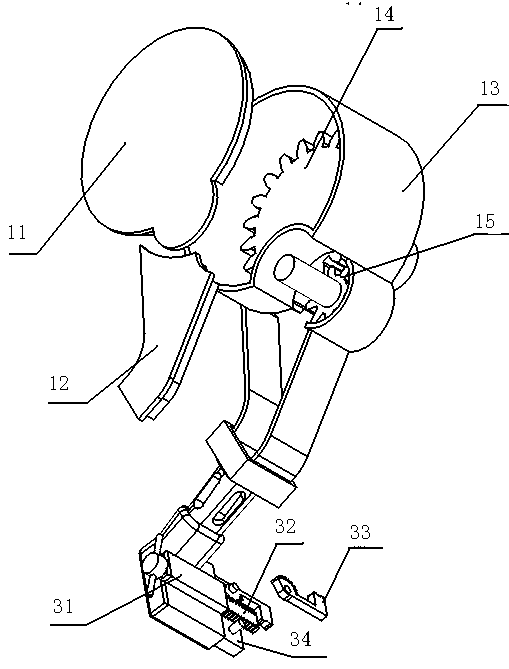
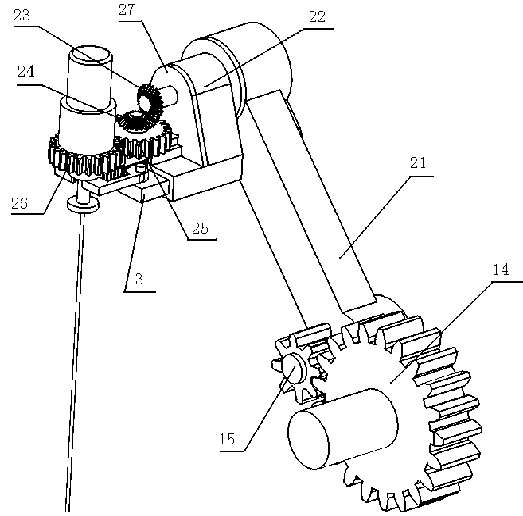
[0012] Depend on figure 1 , figure 2 and image 3 It shows an automatic needle insertion mechanism for a medical robot, which is mainly composed of a support arm mechanism 1, a puncture mechanism 2 and a puncture needle device clamping mechanism 3, wherein: it is composed of a first end cover 11, a second end cover 12 and a box body 13 The support arm mechanism 1, the first transmission gear 14 and the second transmission gear 15 are arranged in the box body 13, the first transmission gear 14 is connected with the sprocket type RCM (movement remote center) mechanism, the second transmission gear 15 is connected with the puncture The mechanism 2 is connected; the extension end of the side turntable 22 of the puncture mechanism 2 main body 21 is equipped with a first bevel gear 23, and meshes with the second bevel gear 24, the first gear 25 and the second bevel gear 24 are integral, and the second bevel gear 25 is integrated with the second bevel gear 24. A gear 25 is meshed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More