

End effector device of under-actuated picking manipulator
A technology of end effectors and manipulators, which is applied in the direction of harvesting machines, manipulators, agricultural machinery and implements, etc., can solve the problems of bloated end effector mechanism, poor product reliability, and reduce the harvestable weight, so as to achieve simple structure, High-efficiency and high-reliability picking operation, easy operation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
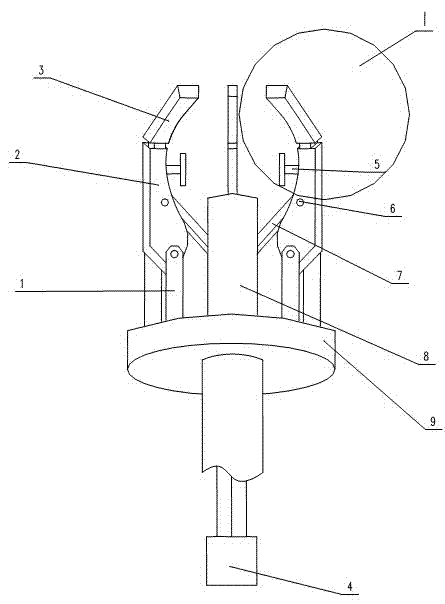
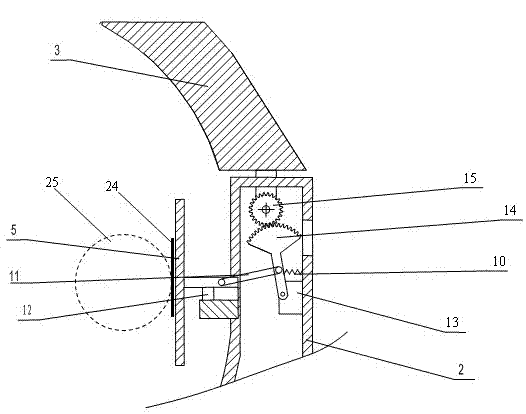
[0017] Such as figure 1 , figure 2 As shown, the present invention includes three fingers with the same structure, a transmission mechanism, three contact plates 5, three connecting rods 7, a drive rod 8 and a rotating disk 9; each finger has three joints, which are respectively the first joint 1 of the finger , the second finger joint 2, the third finger joint 3; one end of the first finger joint 1 is evenly fixed at 120 degrees to each other and installed on the rotating disk 9, and one end of the first connecting rod 7 is hinged with the second finger joint 2, and the first The other end of the connecting rod 7 is hinged with one end of the driving rod 8, and the other end of the driving rod 8 is connected with the transmission mechanism; meshing, the first gear 15 is connected to the bottom end of the third finger joint 3 through a connecting rod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More