

Cooperative real-time path planning method for multiple unmanned aerial vehicles (UAVs) in case of communication latency
A multi-drone, communication delay technology, applied in the field of real-time route planning, can solve the problems of being out of communication range, unable to carry out message transmission and data exchange, and not considering the influence of communication constraints, so as to avoid collision and maintain communication.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
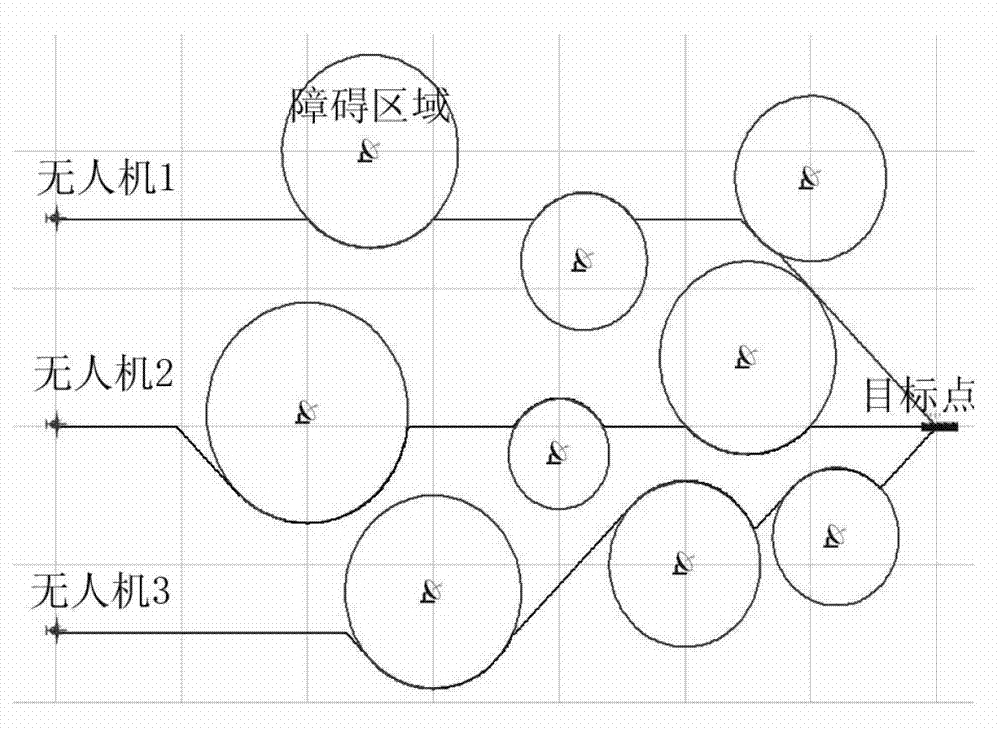
[0047] Assume that the step size of the algorithm execution is Δt, and the initial step size is Δt 0 , the types of UAVs participating in the route planning are the same, and the UAVs are all flying at the same height, and the speed range of the UAVs is v∈(v min , v max ), the minimum safe distance between drones is d min , the maximum communication distance is d max , after executing the communication delay, the minimum distance between UAVs is d′ min , the maximum distance is d′ max . The steps performed by the algorithm are as follows (see attached figure 1 ):
[0048] Step 1: Set the drone data, obstacle data and target point data to generate a digital map for the A* algorithm to call.
[0049] UAV data includes: the number n of UAVs, the initial position coordinates of UAVs (x i ,y i )(i=1, 2, ..., n);
[0050] The obstacle data includes: the number of obstacles m, the center coordinates of the obstacle circle (x j ,y j ), radius rj (j=1,2,...,m);
[0051] Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More