

Upper prosthetic hand pose self-balancing control system and working method thereof
A technology of control system and balance controller, applied in manufacturing tools, prostheses, manipulators, etc., can solve problems such as difficulty in describing path state points, difficulty in describing the initial state and target state, and not one-to-one mapping.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Embodiments of the present invention will be further described below according to the accompanying drawings.
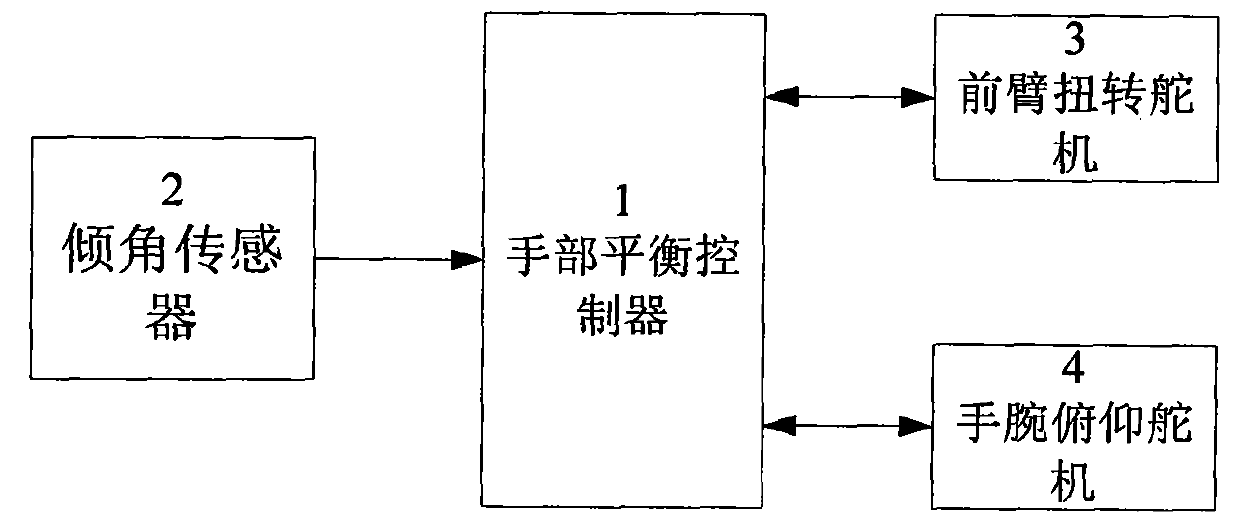
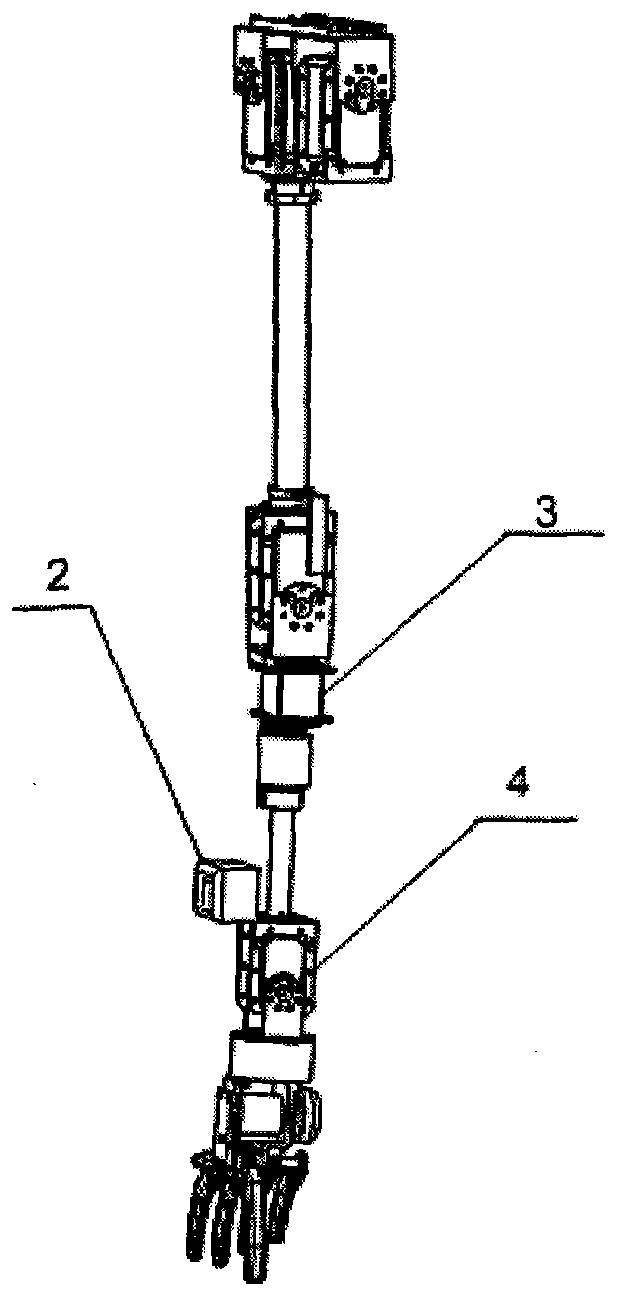
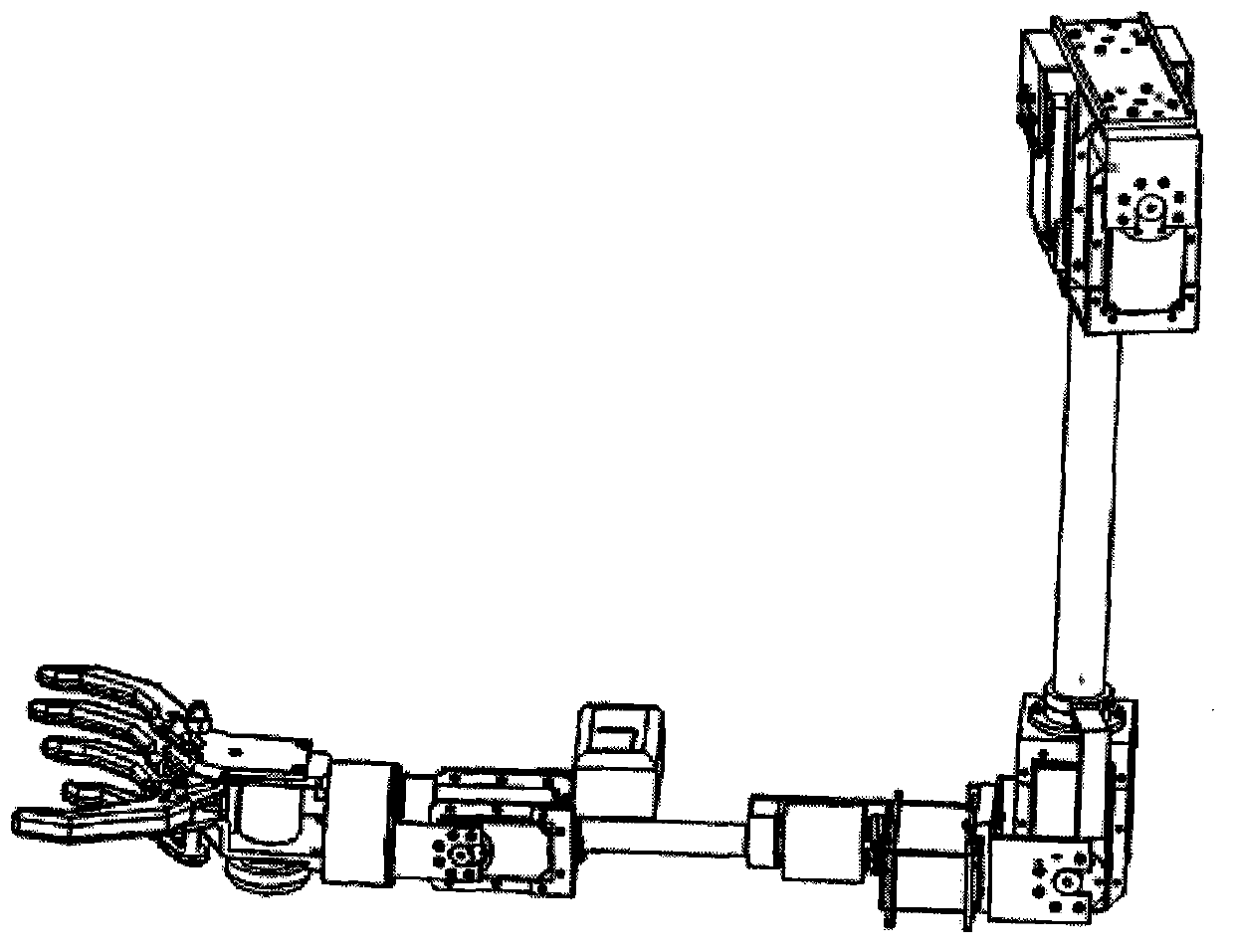
[0035] Such as figure 1 , figure 2 As shown, the upper prosthesis hand posture self-balancing control system of the present invention is that an inclination sensor 2 is fixed on the forearm of the upper prosthesis, and it also includes a hand balance controller 1, which communicates with the upper hand balance controller 1 through a serial port 9. The forearm torsion servo 3 of the prosthesis is connected to the wrist pitch servo 4; the inclination sensor 2 sends the real-time detected forearm posture change data information to the hand balance controller 1 through the analog-to-digital conversion circuit 10 inside the hand balance controller 1 , the hand balance controller 1 controls and adjusts the movement direction and angle of the forearm twisting steering gear 3 and the wrist pitching steering gear 4 in real time, so that the direction of the tiger's mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More