Bevel gear series double-motor-cooperated composite grabbing robot finger device
A technology of robotic fingers and bevel gear trains, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of difficult grasping methods, poor anthropomorphic effects, fixed action modes, etc., and achieve good self-adaptive grasping effects, Good stable grip, easy control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The specific structure and working principle of the present invention will be described in further detail below with reference to the accompanying drawings and multiple embodiments.
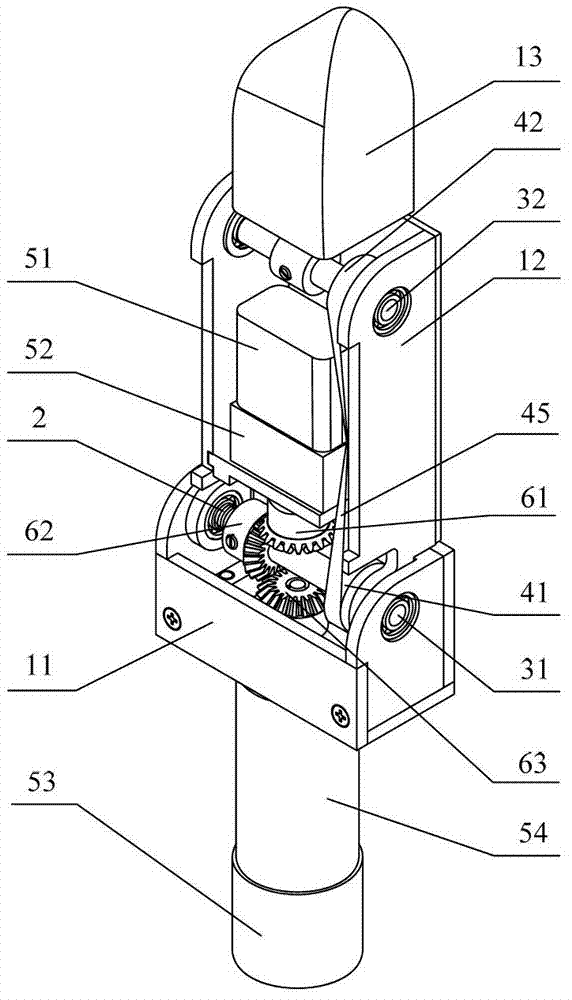
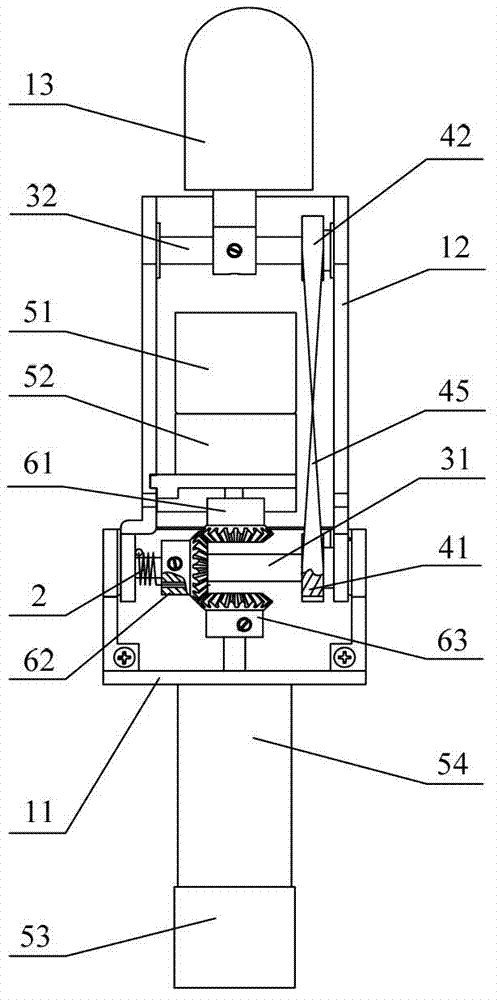
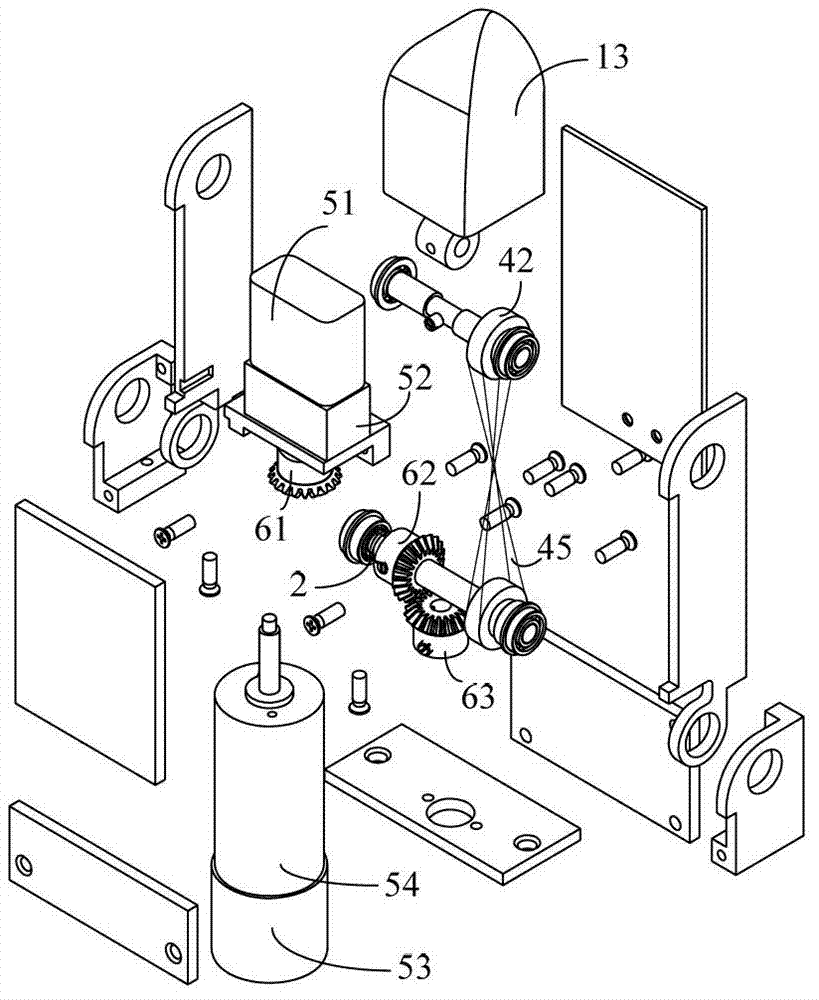
[0040] The first embodiment of the bevel gear train dual-motor cooperative compound grasping robot finger device designed in the present invention, such as figure 1 , figure 2 , image 3 , Figure 4 with Figure 5 As shown, it includes a base 11, a middle finger section 12, a terminal finger section 13, a proximal joint shaft 31 and a distal joint shaft 32; the proximal joint shaft 31 is movably sleeved in the base 11, and the middle finger section 12 is movable Is sleeved on the proximal joint shaft 31, the distal joint shaft 32 is movably sleeved in the middle finger section 12; the end finger section 13 is movably sleeved on the distal joint shaft 32; the proximal joint shaft 31 and the distal joint Axis 2 is parallel; the bevel gear system dual-motor cooperative compound grasping robot fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com