

Integrated navigation system for autonomous underwater robot and method
A technology of integrated navigation system and underwater robot, which is applied in the directions of navigation, surveying and navigation, navigation calculation tools, etc. It can solve the problems of accumulation, attitude and speed data errors, and it is difficult to suppress the heading angle error of the integrated navigation system, so as to achieve improvement Effect of System Accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
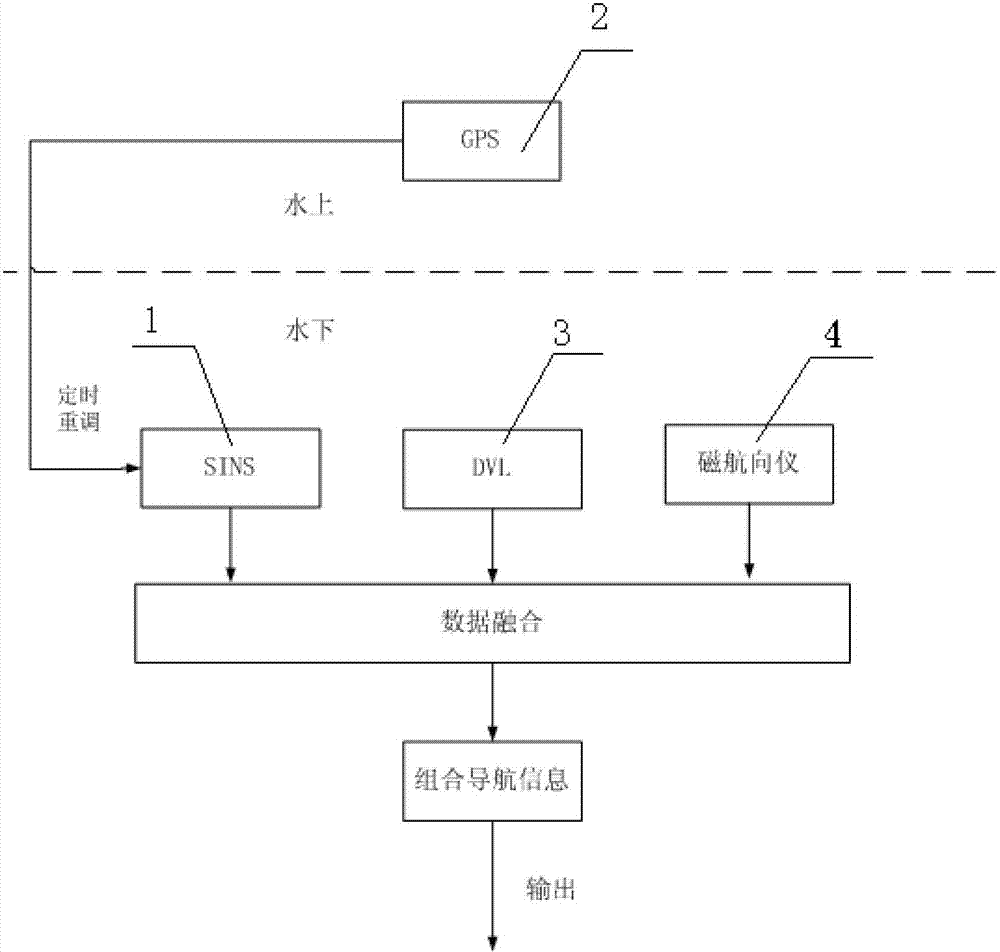
[0053] like figure 1 As shown, the autonomous underwater robot integrated navigation system is composed of a strapdown inertial navigation system 1, a global positioning navigation system 2, a Doppler velocimeter 3, and a magnetic direction indicator 4. The strapdown inertial navigation system 1 utilizes a gyroscope and the accelerometer to calculate the speed information, position information and attitude information relative to the earth along the geographic coordinate system; the global positioning and navigation system 2 obtains the initial absolute position information and speed information of the autonomous underwater robot; the Doppler velocimeter 3. Calculate the speed information; the magnetic heading device 4 calculates the heading information; the global positioning navigation system 2 readjusts the strapdown inertial navigation syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More