

Device for remote iris tracking and acquisition, and method thereof
A collection method and long-distance technology, applied in image data processing, instrument, character and pattern recognition, etc., can solve the problems of low accuracy of recognition algorithm, inability to collect information from a long distance, multiple target interference, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
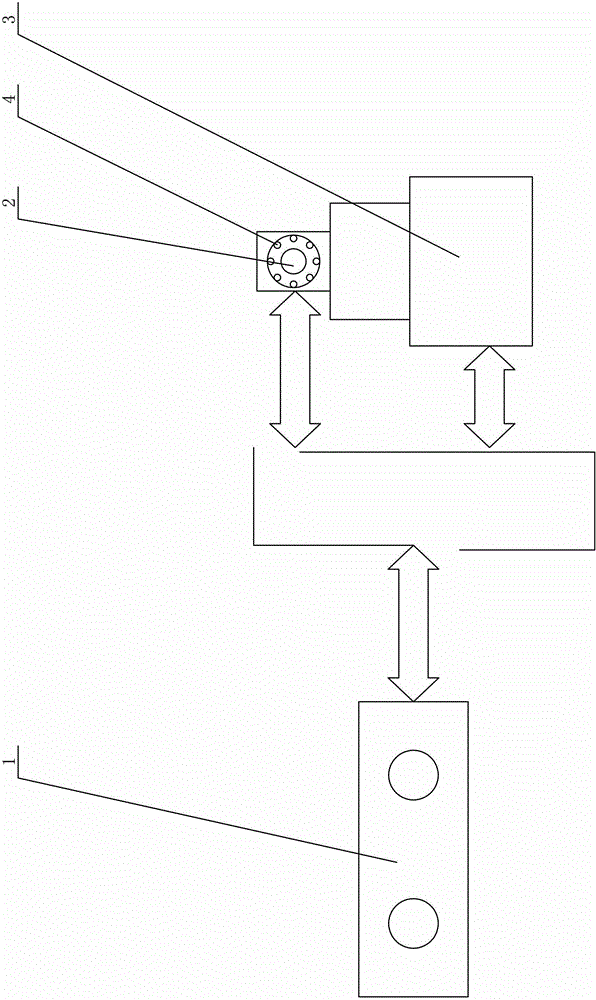
[0051] Specific implementation mode one: combine figure 1 Describe this embodiment, a kind of remote iris tracking and collection device described in this embodiment includes binocular camera 1, telephoto camera 2, two-degree-of-freedom rotating platform 3, infrared light source 4 and computer 5, the binocular camera 1 The signal output end is connected with the face information acquisition signal input end of the computer 5, the signal output end of the telephoto camera 2 is connected with the signal input end of the face information after the variable magnification zoom of the computer 5, and the motion of the two-degree-of-freedom rotating pan platform 3 The signal input end is connected with the pan-tilt motion signal output end of the computer 5, the infrared light source 4 is installed on the telephoto camera 2, and the telephoto camera 2 is installed on the two-degree-of-freedom rotary pan-tilt 3.
[0052] In the present embodiment, the binocular camera 1 is a Bumblebee...
specific Embodiment approach 2
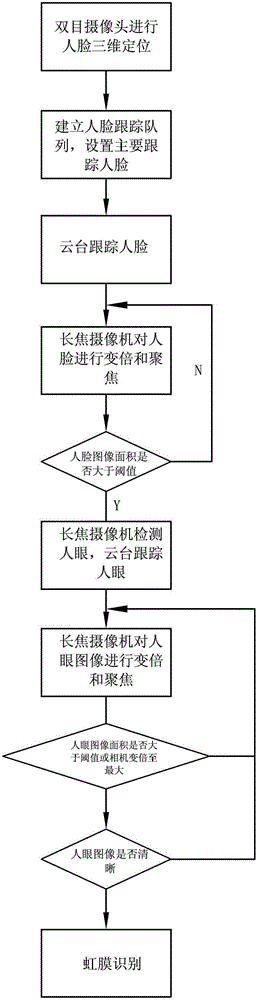
[0053] Specific implementation mode two: combination figure 2 and image 3 Describe this embodiment, the concrete steps of a kind of remote iris tracking and acquisition method described in this embodiment are as follows:
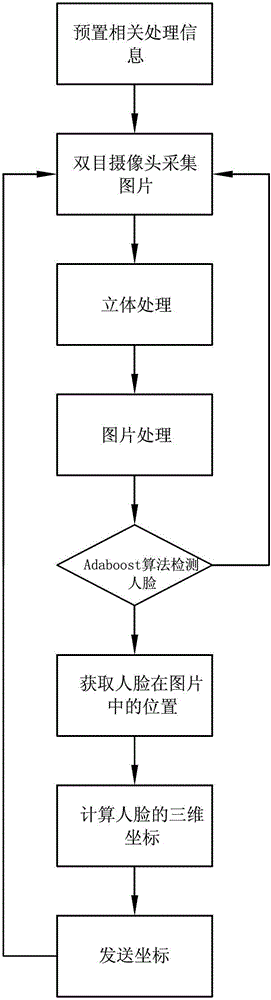
[0054] Step 1. The binocular camera 1 performs three-dimensional positioning of the face: the binocular camera 1 detects the face, and obtains the three-dimensional coordinates of the face position through calculation. The specific steps are as follows:
[0055] Step 1 (1), preset processing information: set the size of the captured image to 512×384, set the ROI to 100%, normalize the captured image, set the size to 512×384, and preset the parallax value range is (0,150);
[0056] Step one (two), binocular camera 1 collects picture; Carry out picture collection to face by binocular camera 1, obtain the collected picture of people's face;
[0057] Step 1 (3), three-dimensional processing: obtain the corrected image and the depth image;
[0058] Step 1 (...
specific Embodiment approach 3
[0101] Specific implementation mode three: combination Figure 4 Describe this embodiment, the specific steps of step one (three) three-dimensional processing of a kind of long-distance iris tracking and acquisition method described in this embodiment are as follows:
[0102] Ⅰ. Preprocessing: filter the collected pictures;
[0103] Ⅱ. Correct the picture;
[0104] Ⅲ. Image stereo matching: process the pre-processed collected images with the stereo matching method to obtain depth information. The matching calculation method is as follows:
[0105] min d min d max Σ i = - m 2 m 2 Σ j = - m 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More