

Solution for multiple mobile robot path conflict based on dense storage regions
A mobile robot and storage area technology, applied in the field of mobile robots, can solve the problems of complex operation, increased difficulty, poor real-time performance, etc., and achieve the effects of high efficiency, avoiding path conflicts, and high efficiency and feasibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
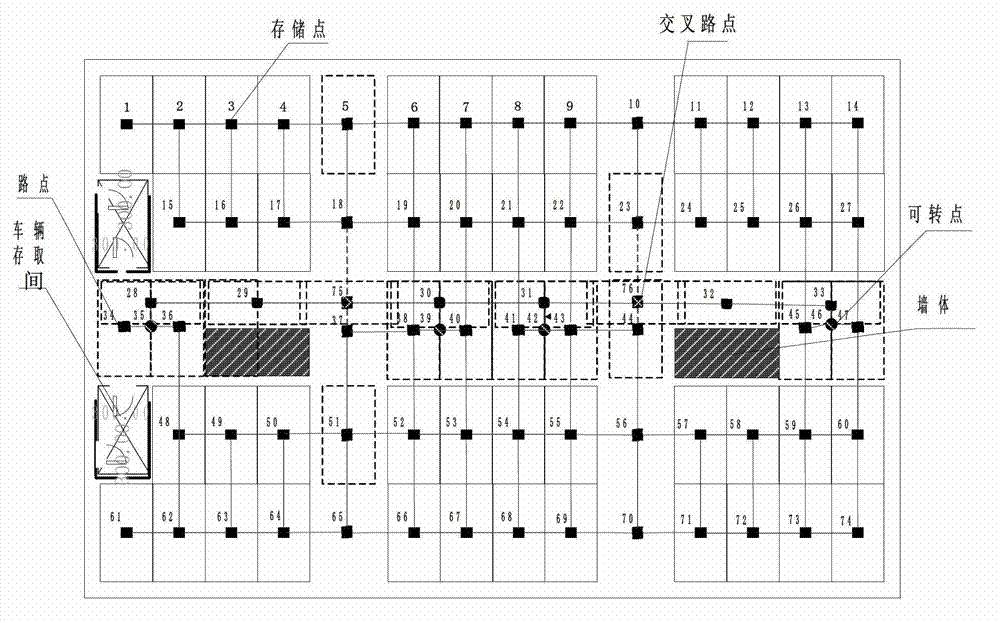
[0051] A path conflict resolution method for multiple mobile robots based on dense storage areas, based on a prior patent application (patent name: a high-density automatic three-dimensional storage system, application number: 201210052054.3). The mobile robot adopts a fully automatic transport vehicle, which can make the cargo oblique translation, horizontal horizontal movement and in-situ radius rotation by twisting the wheel angle while ensuring that the body does not move. The goods are placed on the cargo pallet. The cargo pallet is supported on the ground by four pallet legs. The height of the four pallet legs is slightly higher than the height of the mobile robot. The mobile robot can walk between any two pallet legs.
[0052] Such as figure 1 As shown, the path conflict resolution method for multiple mobile robots based on dense storage ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More