

Biomimetic crop picking robot
A technology for picking robots and crops, applied in picking machines, agricultural machinery and implements, agriculture, etc., can solve problems such as poor natural flexibility, poor environmental adaptability, and low manufacturing and maintenance costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
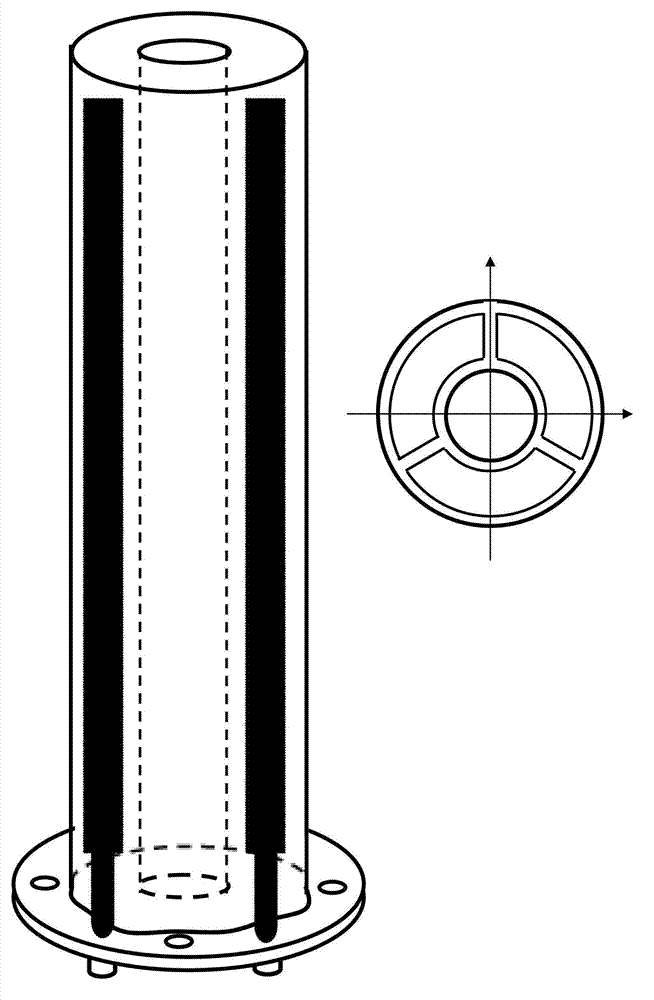
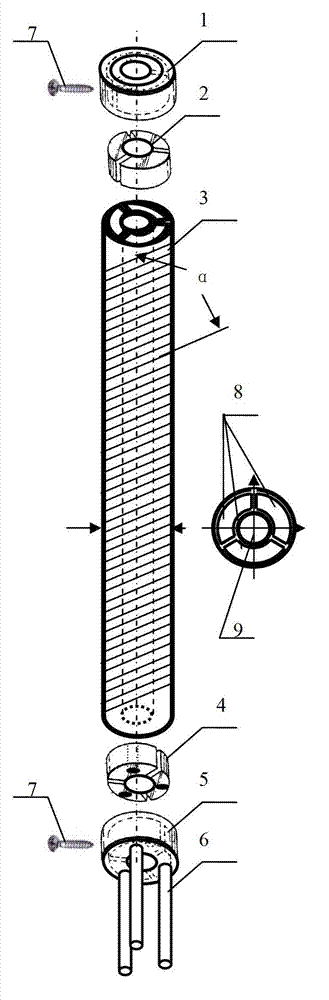
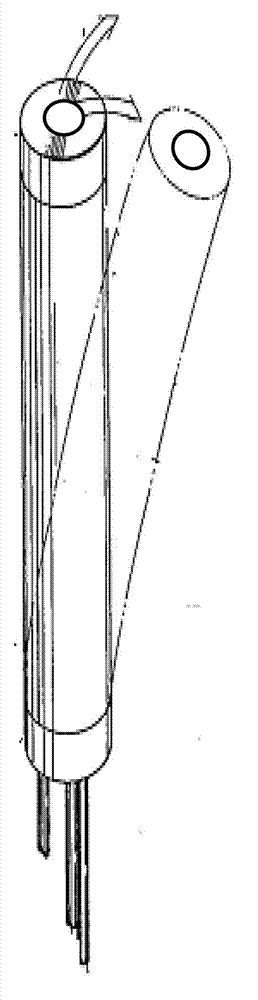
[0045] Reference Figure 1~Figure 8 , A bionic crop picking robot, including a picking pipe based on pneumatic artificial muscles, an air pressure generator used to pass into the cavity in the picking pipe, and a pneumatic control for the air pressure passing into the cavity of each picking pipe Pressure proportional control valve, a pressure sensor used to detect the air pressure in the cavity of each picking pipe, a pneumatic pressure proportional controller used to coordinate control of each pneumatic pressure proportional control valve, used to suck the picking object Pulse vacuum generation module, used to control the picking control subsystem that performs the picking action, binocular stereo panoramic vision sensor used for the identification and positioning of the picking object, and intelligent video analysis subsystem, used to complete path planning and obstacle avoidance tasks Binocular stereo panoramic vision sensor and autonomous navigation subsystem, used to colle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More