

Multimode under-actuated human finger simulation device with quick reflex grabbing function
An underactuated, multi-mode technology, applied in the field of humanoid prosthetic hands, can solve the problems of difficult knuckles, unstable grasping, and lack of self-adaptability, etc., and achieve the effect of improving the grasping motion space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
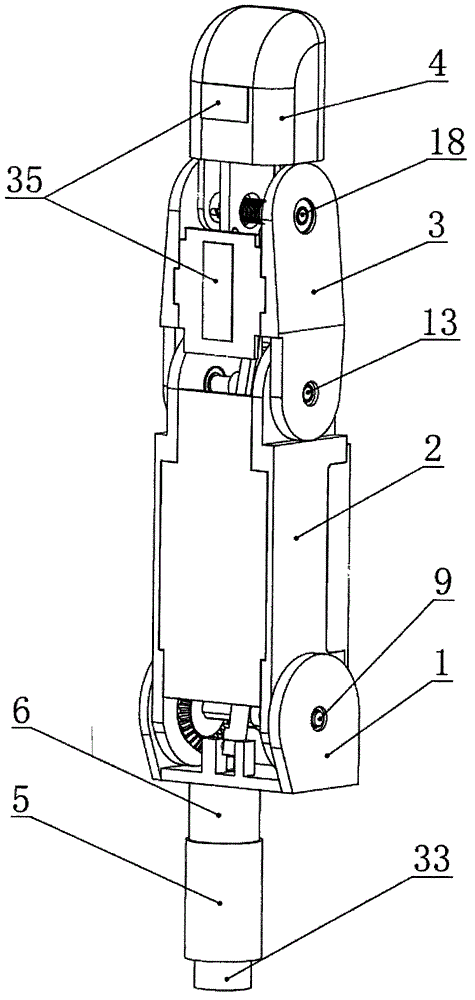
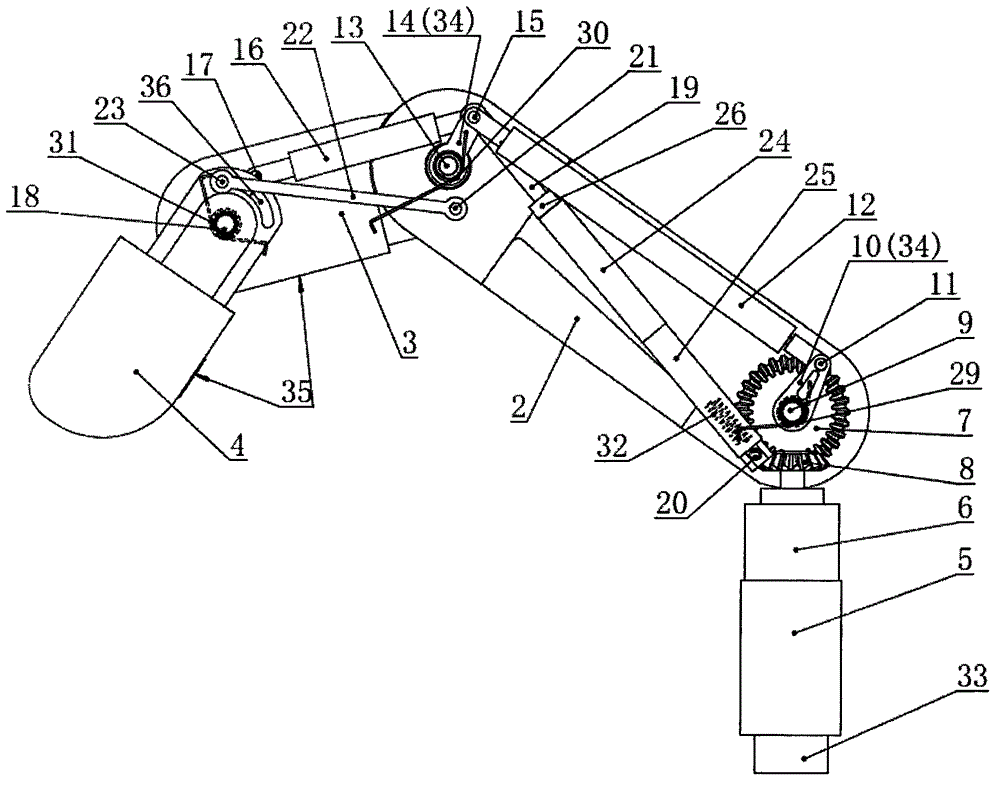
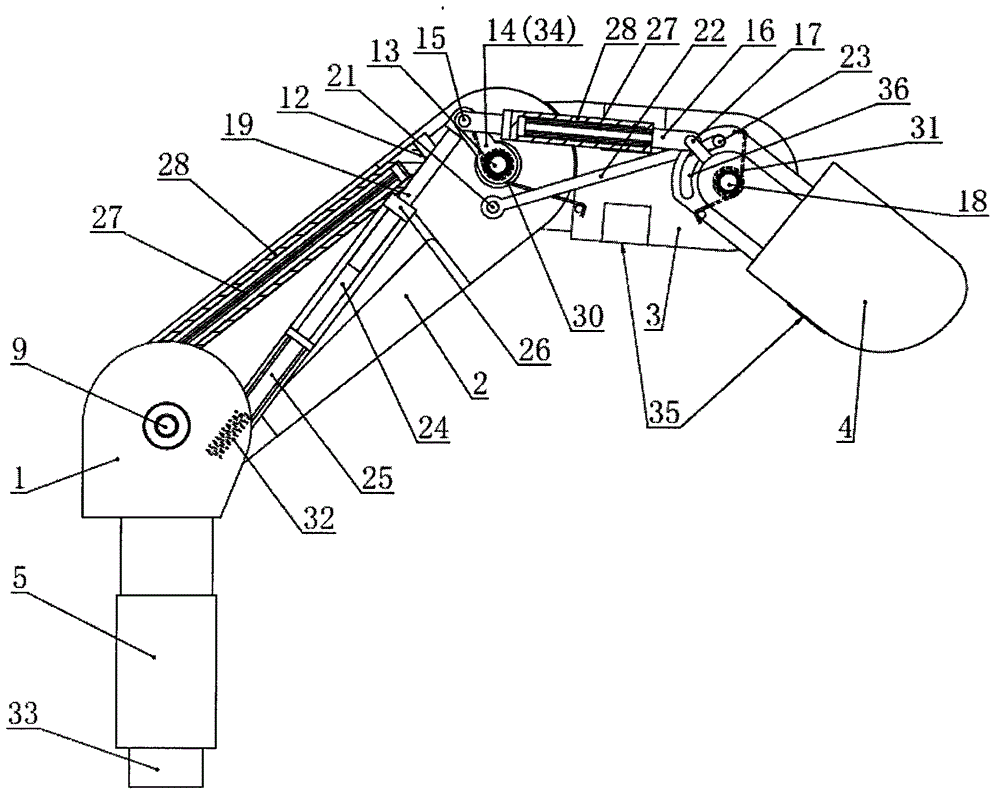
[0046] An embodiment of a multi-mode underactuated humanoid finger device with fast reflex grasping function according to the present invention, the three-dimensional diagram, side view and front view of the mechanism of its specific structure are as follows Figure 1 to Figure 4 shown. This embodiment is composed of a base 1, a proximal knuckle 2, a middle knuckle 3 and a far knuckle 4, and has a main motion mechanism, a secondary motion mechanism, an elastic coupling link mechanism and a link overrunning mechanism.
[0047] The main motion mechanism includes motor 5, reducer 6, small bevel gear 7, large bevel gear 8, proximal joint shaft 9, middle joint shaft 13, distal joint shaft 18, proximal knuckle 2, middle knuckle 3, and far knuckle 4 The connecting rod, shaft and elastic element; the motor 5 is fixedly connected to the base 1, the output shaft of the motor 5 is connected to the input shaft of the reducer 6, and the output shaft of the reducer 6 is connected to the sma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More