

Flight path planning method based on sparse A* algorithm and genetic algorithm
A technology of track planning and genetic algorithm, applied in three-dimensional position/channel control and other directions, which can solve the problem of UAV track planning falling into local search and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
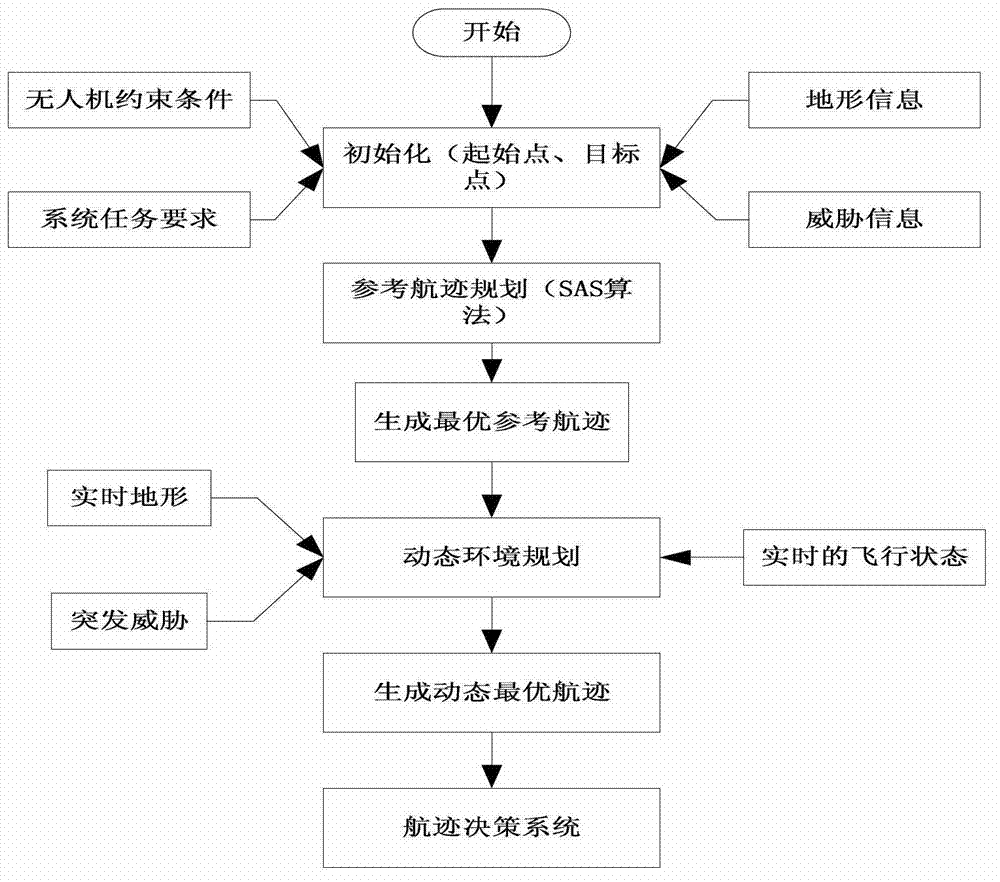
[0156] Firstly, the flight environment model is established and relevant parameters are selected. Using SAS algorithm for off-line track planning. This example uses the following parameter values:
[0157] ●The coefficient W in the cost function 1 =W 2 =W 3 =1 / 3,
[0158] ●The minimum track segment length is 4km; the minimum flight altitude is 35m; the maximum turning angle and maximum climb / glide angle are 30° and 35° respectively;
[0159] ●The minimum track segment length is 2km;
[0160] ●The maximum path distance is 1.5 times the straight-line distance between the starting point and the target point;
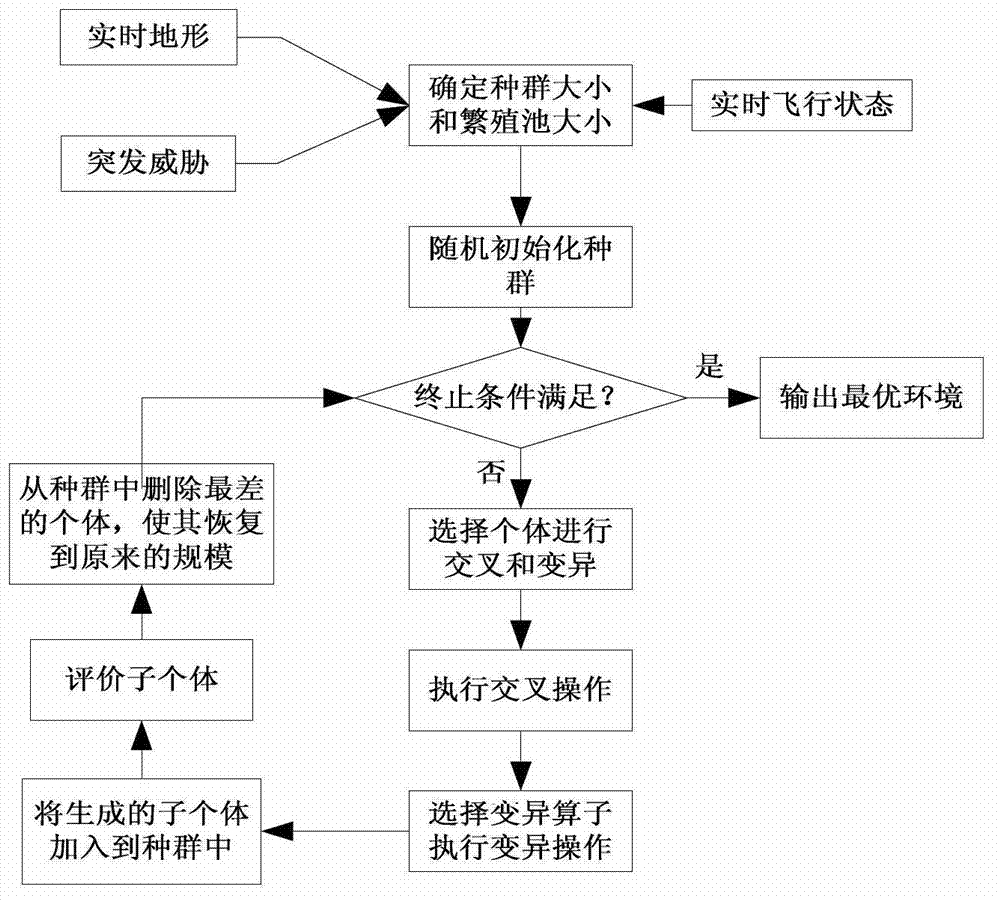
[0161] The probability of crossover operator is selected as 0.25, the probability of disturbance operator, insertion operator, deletion operator and exchange operator is selected as 0.1, and the probability of smoothing operator and directional disturbance operator is selected as 1;
[0162] ●The population size is 60, and 30 tracks are selected for each iteration,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More