

Parabolic trajectory directional tangent constant speed welding robot device
A welding robot and parabolic technology, applied in welding equipment, arc welding equipment, manufacturing tools, etc., can solve problems such as low welding efficiency, high technical level requirements for workers, and complicated equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The specific structure and working principle of the present invention will be described in further detail below with reference to the drawings and embodiments.
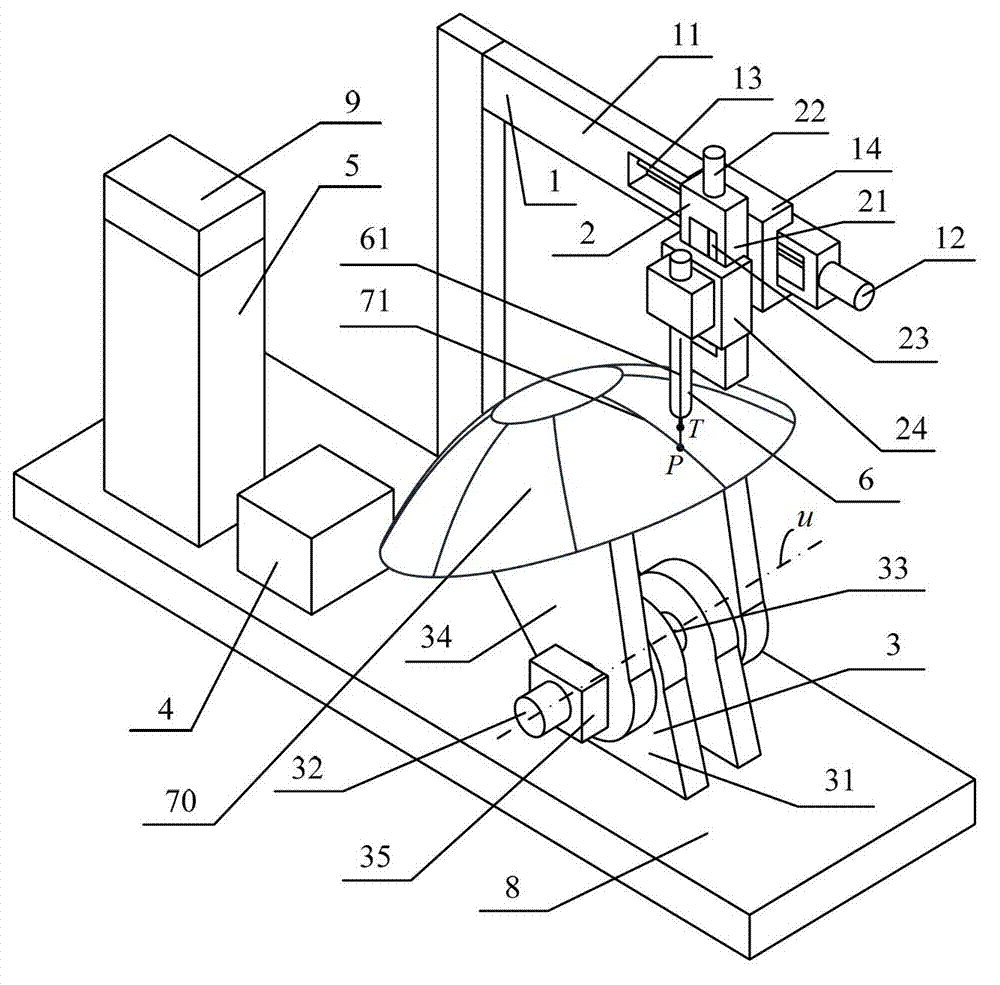
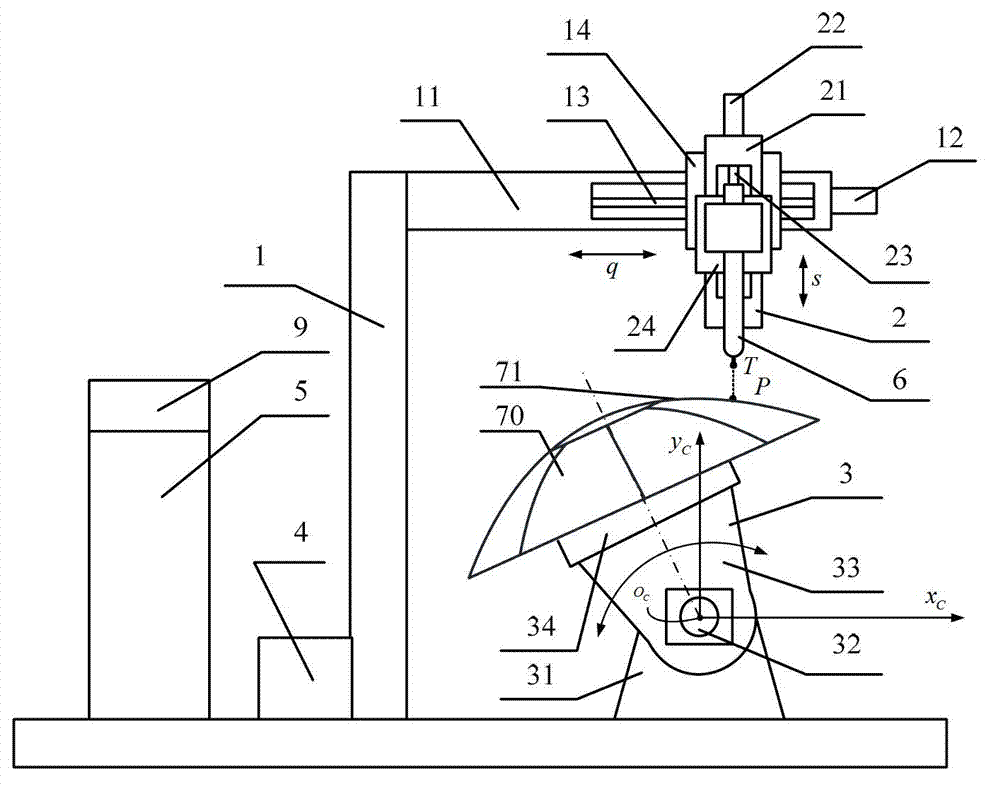
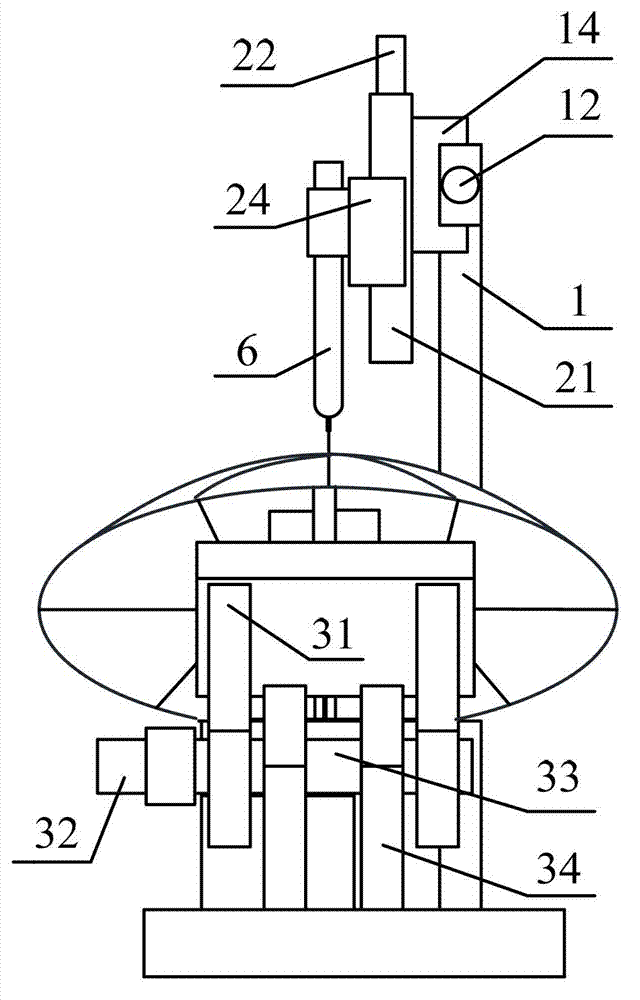
[0075] An embodiment of the parabolic trajectory oriented tangent constant speed welding robot device provided by the present invention, such as figure 1 , figure 2 , image 3 with Figure 4 As shown, it includes a mechanical arm, a Z-axis turntable 3, a controller 4, a welding power source 5, and a welding gun 6. The mechanical arm includes an X-axis translation assembly 1 and a Y-axis translation assembly 2 connected in series in sequence; welding of the workpiece 70 to be welded The center line of the seam is a parabolic trajectory 71;
[0076] The X-axis translation assembly 1 includes a first base 11, an X-axis motor 12, an X-axis transmission mechanism 13, and a first sliding block 14. The first base 11 is fixed to the base 8, and the X-axis motor 12 It is fixedly connected to the first base 11, the output s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More