

Method for detecting unmanned aerial vehicle visual navigation landing cooperative target robust
A cooperative target and visual navigation technology, applied in the field of navigation, can solve problems such as large-scale distortion of cooperative targets, undiscovered detection methods, etc., and achieve the effects of strong anti-interference ability, development prospects, engineering application value, and convenient implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0035] The method of the present invention is further specifically described below, and the specific implementation steps of each part are as follows:
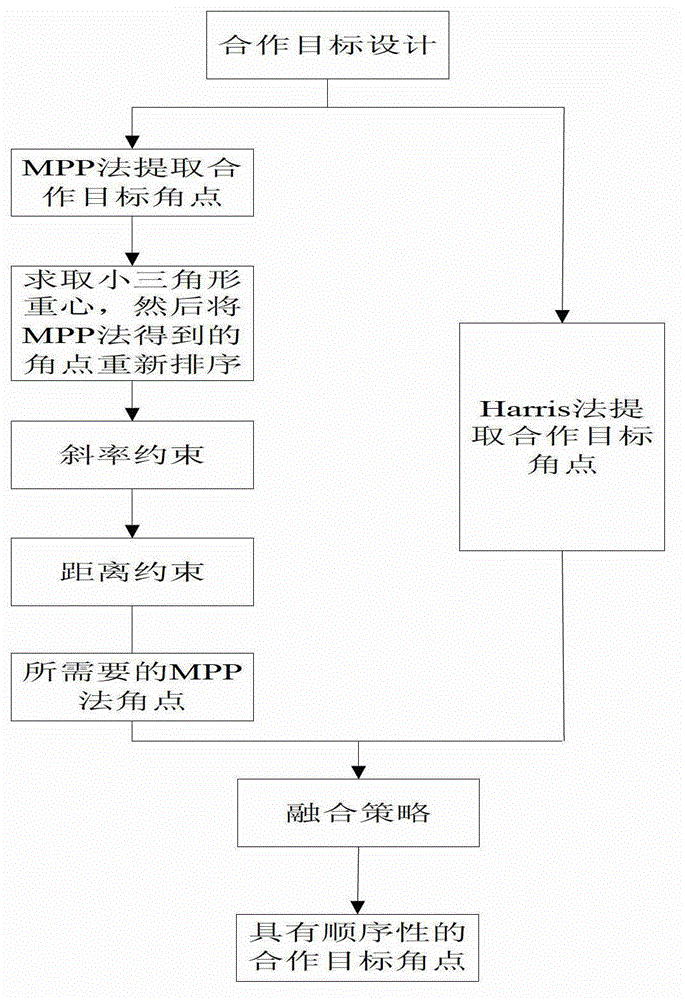
[0036] 1. Design of cooperation goals
[0037] The red square is used as the large backplane, the fluorescent green H and the small regular triangle are used as cooperation targets, and the small regular triangle is placed 45 degrees below the H shape.
[0038] 2. Image preprocessing
[0039] The image is preprocessed by threshold segmentation, median filter, erosion and dilation to separate the target and background. The threshold segmentation method adopts adaptive threshold segmentation, and the formula is as follows:
[0040] R(i,j)>90&&R(i,j)^2>2*(G(i,j)^2+B(i,j)^2) (1)
[0041] Among them, R(i, j), G(i, j) and B(i, j) are the red, green and blue components of the image respectively.
[0042] 3. Extract...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More