

Hybrid control based stability augmentation control method of quad-rotor unmanned helicopter
A four-rotor UAV and controller technology, which is applied in three-dimensional position/channel control and other directions, can solve the problem that the quadrotor UAV cannot fly stably, achieve the effect of improving the flight state and avoiding out-of-control situations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The preferred embodiments will be described in detail below in conjunction with the accompanying drawings. It should be emphasized that the following description is only exemplary and not intended to limit the scope of the invention and its application.
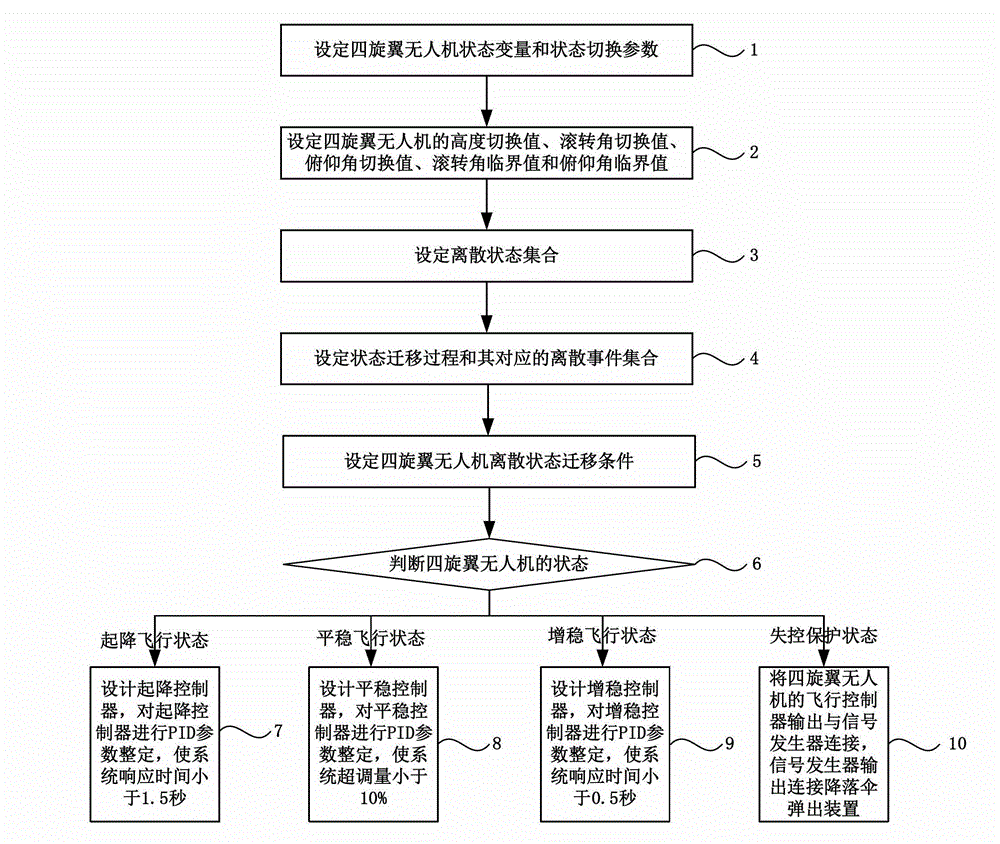
[0031] figure 1 It is a flow chart of the stability-increasing control method for quadrotor UAV based on hybrid control. figure 1 Among them, the hybrid control-based quadrotor UAV stabilization control method provided by the present invention includes:
[0032] Step 1: Set the flight state variables of the quadrotor UAV and select the state switching parameters.
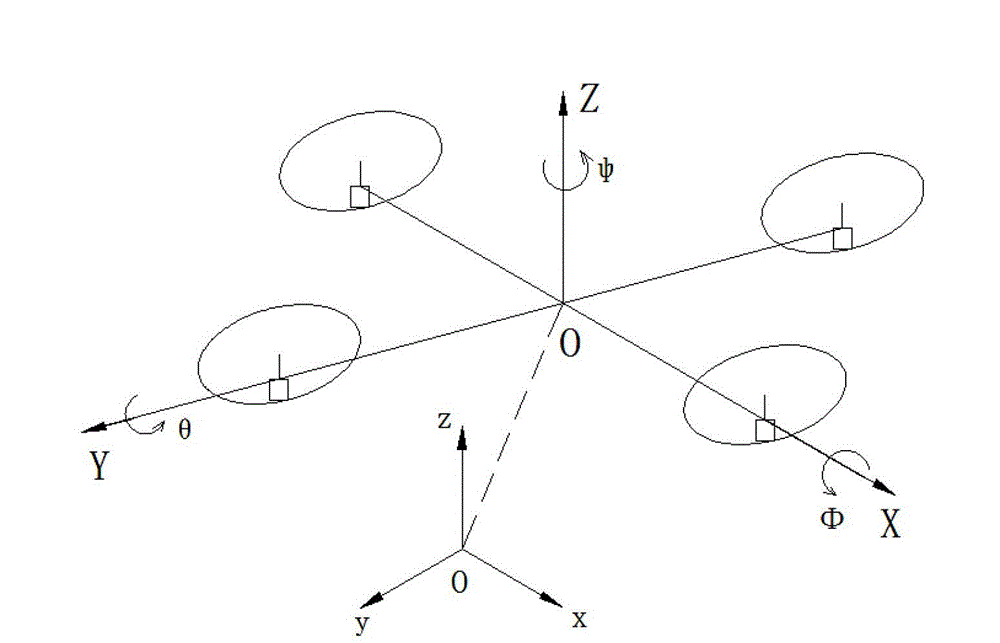
[0033] The state variable of the quadrotor UAV is S={x, y, z, φ, θ, ψ}, where x is the longitude of the quadrotor UAV, y is the latitude of the quadrotor UAV, z is the The height of the man-machine, φ is the roll angle of the quadrotor drone, θ is the pitch angle of the quadrotor drone, and ψ is the yaw angle of the quadrotor drone.
[0034] The state va...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More