

Noncausal effective learning control system and method of precision motion control system
A technology of learning control and control system, applied in the direction of digital control, electrical program control, etc., can solve the problems of long dynamic adjustment time and low system work efficiency, and achieve the effect of enhancing applicability, increasing pertinence, and simple and easy implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
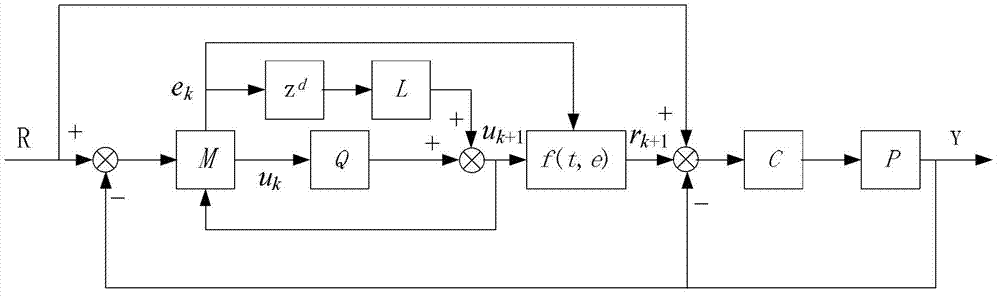
[0030] Specific implementation mode one: the following combination figure 1 Describe this embodiment, the acausal effective learning control system of the precision motion control system described in this embodiment, it includes control object P, this control object P is a precision motion control system, it includes acausal learning control law module, effective learning function f(t, e) module, memory M and feedback control law C module,
[0031] The acausal learning control law module consists of a time delay factor z d module, causal learning law L module and filter Q, d is the delay time parameter,
[0032] The error amount e between the reference control input quantity R of the control object P and the actual output quantity Y k Input to the memory M, the control quantity u of the memory M k Output to filter Q;
[0033] The error amount e of the memory M k gives the time delay factor z d module, time delay factor z d The output signal of the module is given to the...
specific Embodiment approach 2
[0038] Specific implementation mode two: the following combination Figure 1 to Figure 9 Describe this embodiment. This embodiment is a control method based on the non-causal effective learning control system of the precision motion control system described in Embodiment 1. It uses a memory M to store the error amount e of the iterative process k and control quantity u k , k=1, 2, 3..., k is the motion cycle,
[0039] The amount of error e in the memory M k elapsed time delay factor z d The module obtains the error amount at time t+d, and the error amount at time t+d obtains the change amount of learning control through the causal learning law L module. bad get e k moment,
[0040] At the same time, the control quantity u in the memory M k The modified control amount of the kth motion cycle is obtained through the filter Q, and the modified control amount is added to the change amount of the learning control output by the causal learning law L module to obtain the learni...
specific Embodiment approach 3
[0046] Specific Embodiment 3: This embodiment is a further description of Embodiment 2. During the motion cycle of k=1, the control amount u k = 0, error amount e k =0.
[0047] This embodiment shows that the process of effective learning control is to first set the initial condition, that is, in the first motion cycle, the initial control amount u in the memory M 1 and the error amount e 1 Both are 0. If the time range included in a motion cycle is t0~tf, and the sampling period is ts, then the dimension of the control amount and the error amount is 1+(tf-t0) / ts.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More