

Stochastic Optimization of Planetary Landing Trajectories Based on Observability Constraints
A stochastic optimization, planetary technology, applied in the direction of instrumentation, adaptive control, control/regulation system, etc., can solve problems such as poor estimation performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
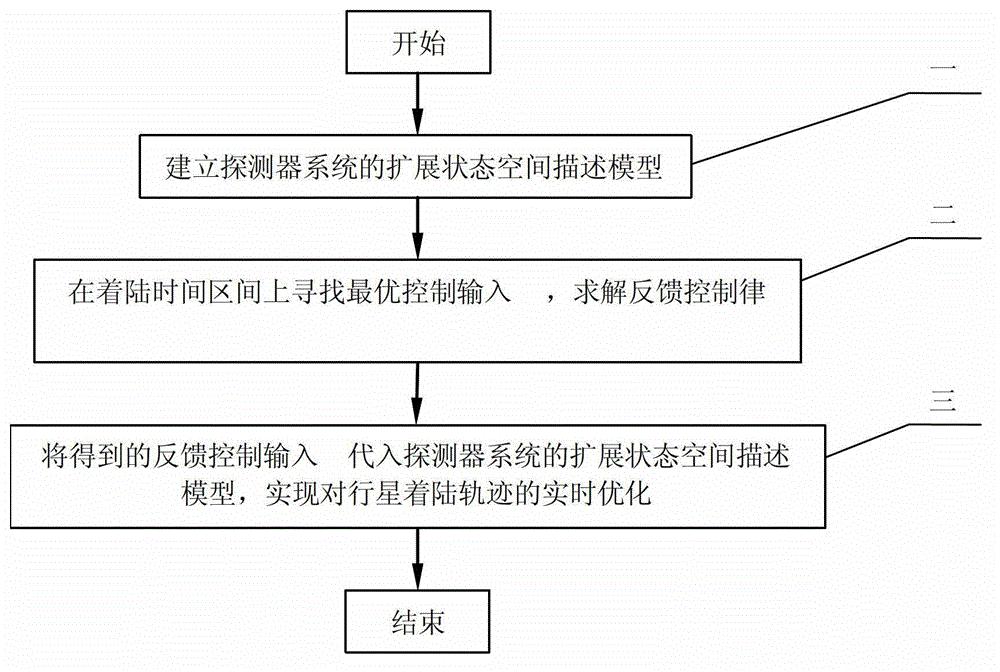
[0024] In order to further illustrate the purpose and advantages of the present invention, the content of the present invention will be further described below with reference to the accompanying drawings and embodiments.
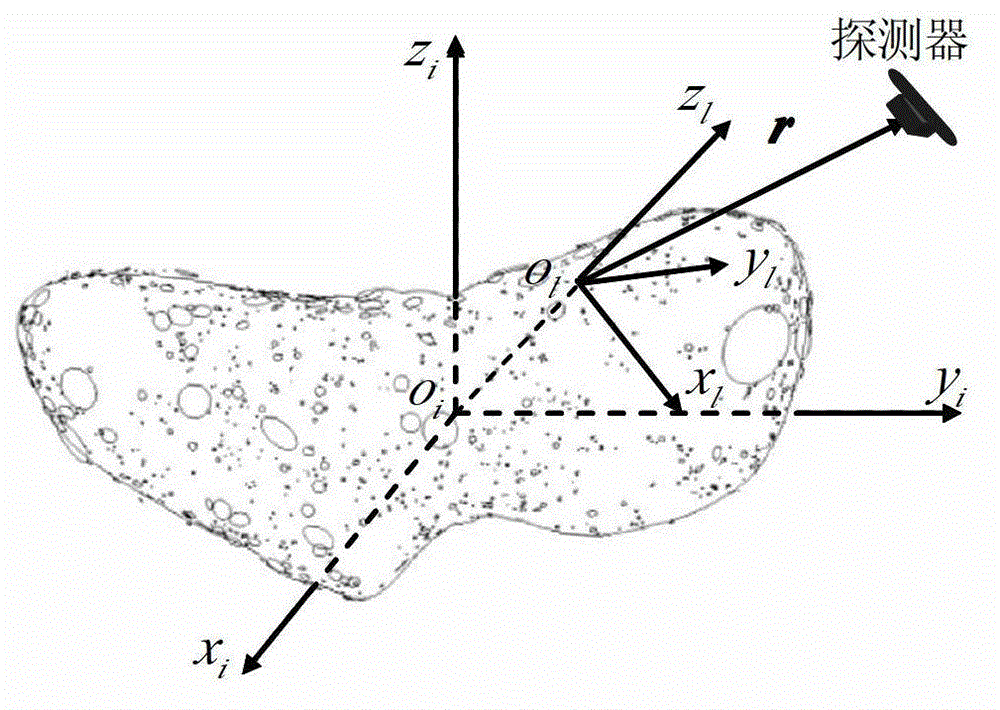
[0025] ①Establish the dynamic equation of the probe in the fixed coordinate system of the landing site
[0026] r · = v ·
[0027] v · = u + g - a e - a k + a Δ
[0028] Among them, r, v are the position vector and velocity vector of the probe relative to the scheduled landing site, u is the control input of the probe, g is the planetary acceleration of gravity, a e ,a k Are the centrifugal inertial acceleration and Coriolis acceleration caused by the planet’s spin, a △ Is unmodeled acceleration.
[0029] The fixed coordinate system of the landing point is defined as ∑ l :o l -x l y l z l , The origin of the coordinate system o l Located at the scheduled landing point, o l z l The axis and planetary center ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More