

Comprehensive re-setting control method for ship rudder stabilization
A control method and control algorithm technology, which can be applied to equipment that reduces the motion of ships, equipment that increases the stability of ships, ships, etc., and can solve the problems of uncertain structural model and increased yaw angle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be described in more detail below in conjunction with the accompanying drawings:
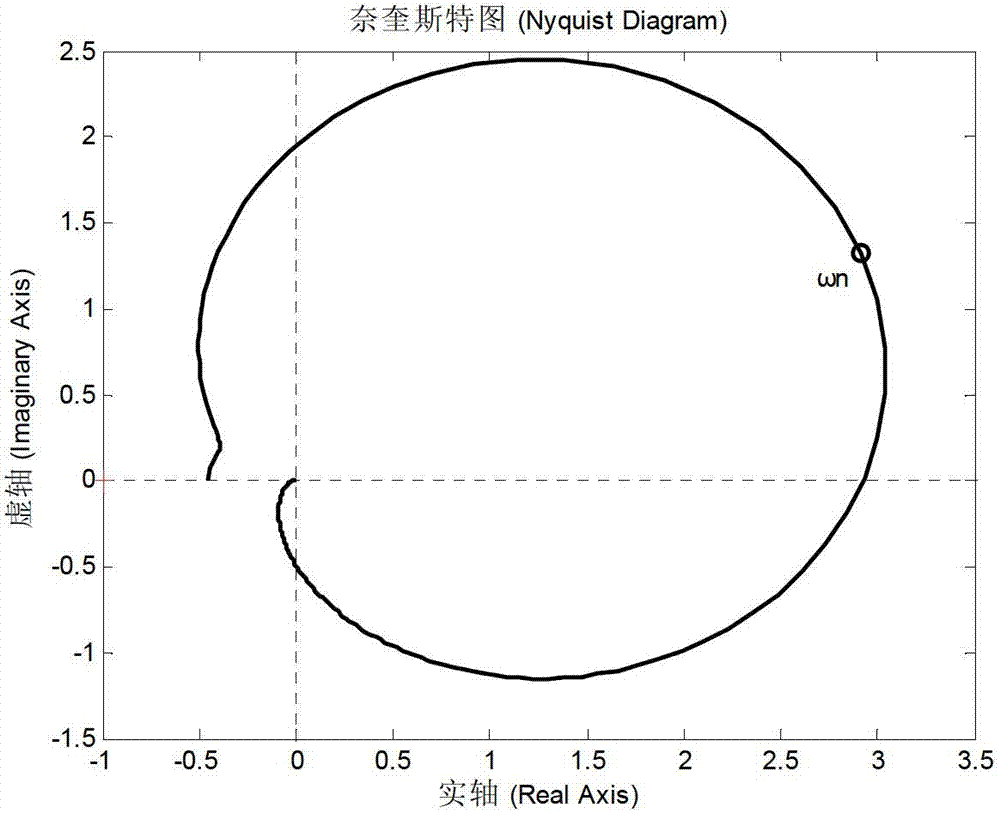
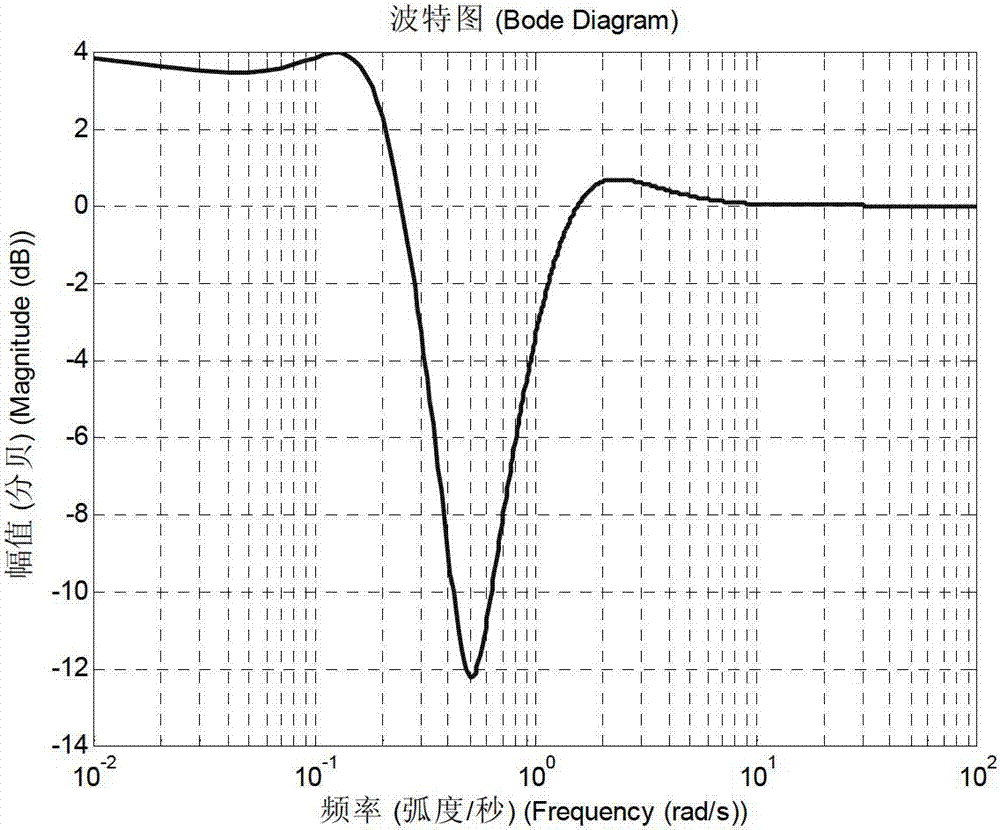
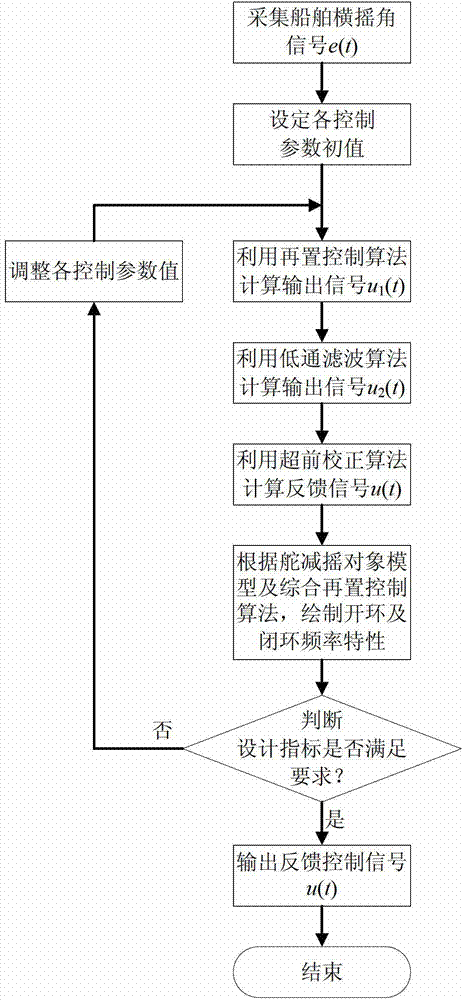
[0049] combine Figure 1 to Figure 4 , the present invention comprises the following steps:
[0050] Step 1: Collect the ship roll angle signal e(t), and set the initial value of each control parameter.
[0051] Set the feedback coefficient ω p The initial value is 0.01rad / s, the differential time constant τ 1 =1 / (1.62ω p )≈61.73s;
[0052] Set the filter time constant T f The initial value is 0.1;
[0053] Set the adjustable gain coefficient k 0 The initial value is 1, and the corner frequency is 1 / T 1 and 1 / T 2 The initial values are 10rad / s and 2rad / s respectively.
[0054] Step 2: Take the ship roll angle e(t) as the input, and use the reset control algorithm based on nonlinear integration (clegg integration) and differential compensation to calculate the output signal u 1 (t).
[0055] combine figure 2 , the specific implementation process o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More