

Upper-limb rehabilitation training robot
A rehabilitation robot and rehabilitation training technology, applied in the field of medical rehabilitation training equipment, can solve the problems of incomplete hand joint movement, inconvenient adjustment of driving force, complex hand structure, etc., and achieve the effect of low noise, large torque and stable transmission
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
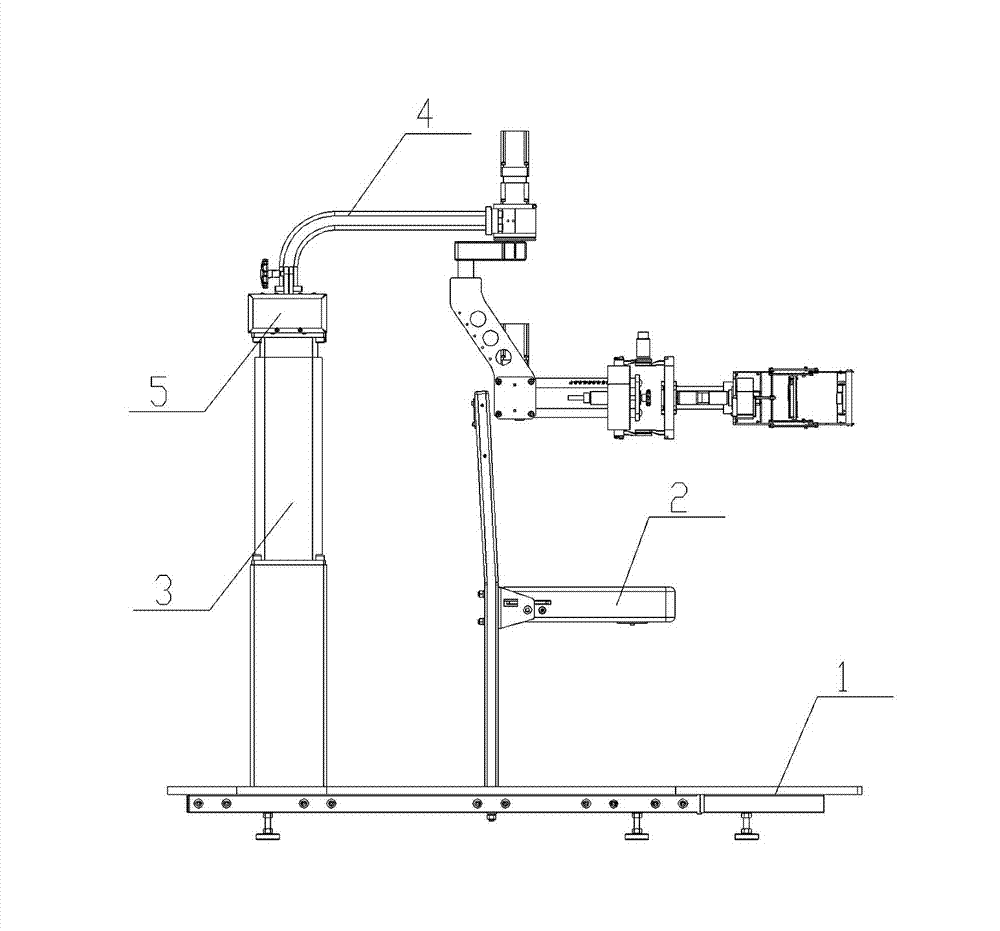
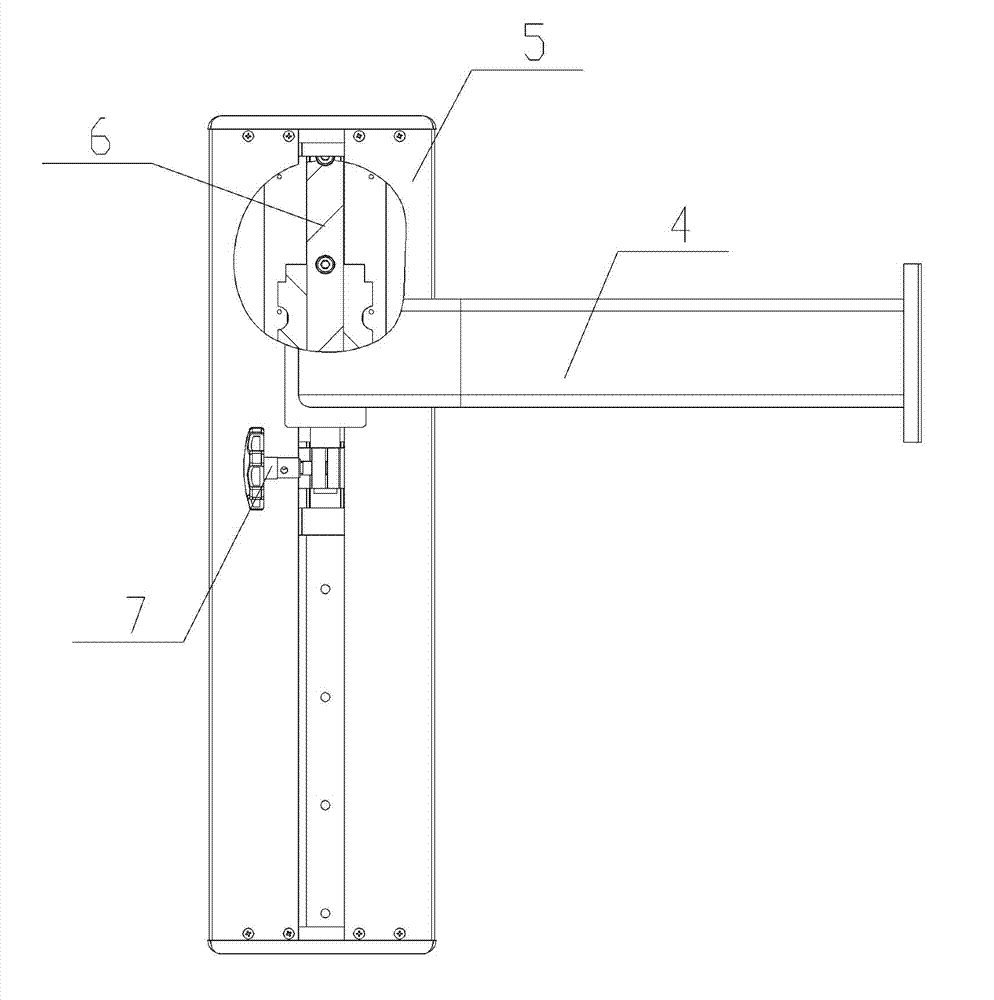
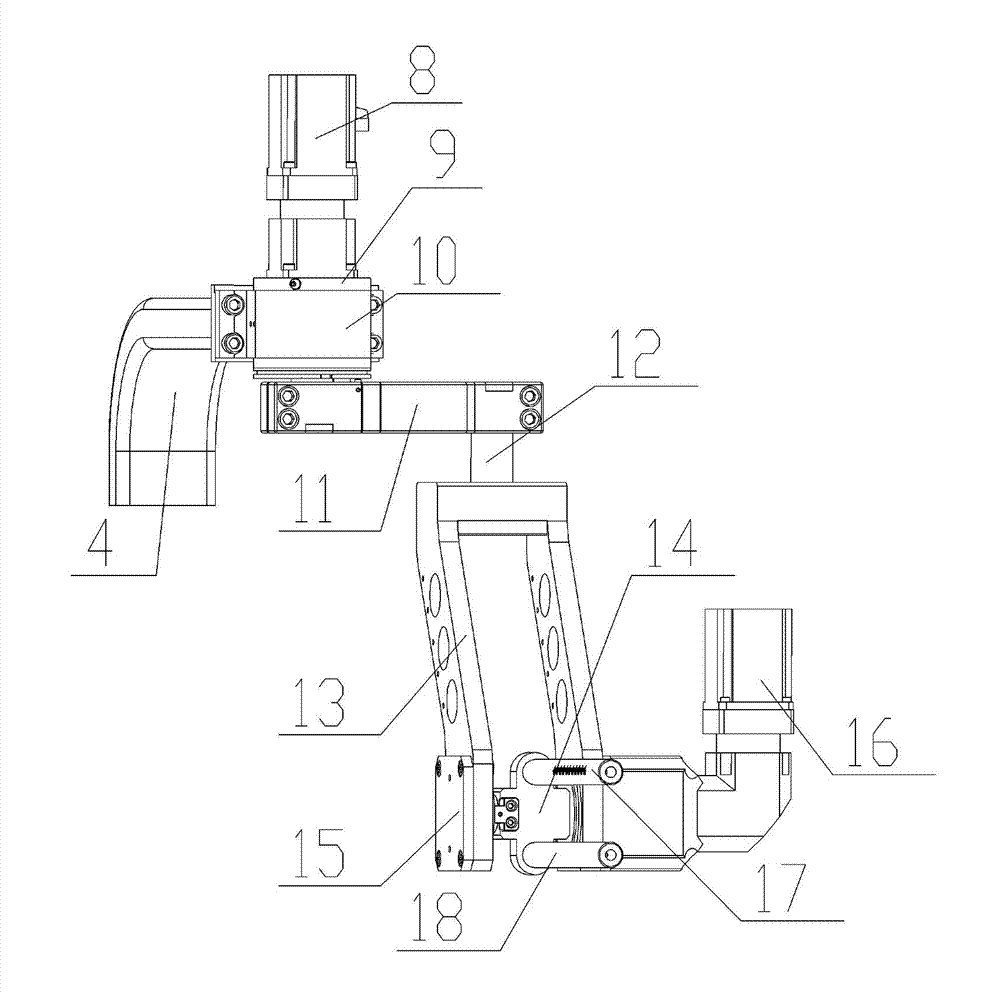
[0025] see Figure 1-8 ,1. Base, 2. Seat, 3. Support frame cross bar, 4. Cantilever beam, 5. Support frame, 6. Chute, 7. Hand wheel, 8. Motor reducer, 9. Bearing cover, 10. Bearing seat, 11. Swivel arm, 12. Connecting shaft, 13. Fork base, 14. Rotary shaft, 15. Bearing seat, 16. Motor reducer, 17. Rotary rod, 18. Rotary rod, 19. Upper sealing plate , 20. Adjusting screw, 21. Pulley, 22. Fixed plate, 23. Hand wheel, 24. Boss, 25. Protrusion, 26. Protrusion, 27. Semicircular slip ring, 28. Bandage, 29. Pulley Idler, 30. Motor reducer, 31. Encoder, 32. Fast rotation, 33. Baffle, 34. Encoder, 35. Baffle, 36. Belt. 37, Lower sealing plate, 38. Rib, 39 .Encoder, 40. Motor reducer, 41. Slider, 42. Motor reducer, pulley. (43), 44. Slider, 45. Slider, 46. Motor reducer, 47. Encoder, 48. Motor fixing plate, 49. Hand bracket, 50. Ring arm support, 51. Push rod, 52. Drive shaft, 53. Hand bandage, 54. Fixing rod, 55. Limit screw, 56. Fixing plate, 57. Finger pole, 58. Bearing, 59. Beari...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More