Flexible mechanical arm mechanism driven by shape memory alloy (SMA) wires and flexible mechanical arm thereof
A flexible robotic arm and memory alloy wire technology, applied in the field of robotics, can solve problems such as difficult stretching and twisting, and achieve the effect of increasing flexibility and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific technical solution of the shape memory alloy wire-driven flexible mechanical arm mechanism of the present invention will be described below in conjunction with the accompanying drawings.
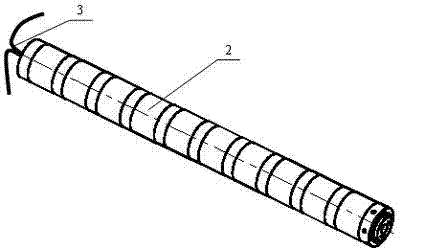
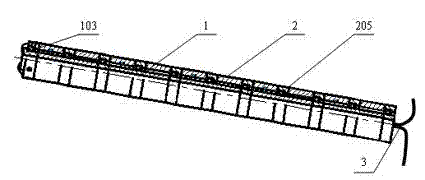
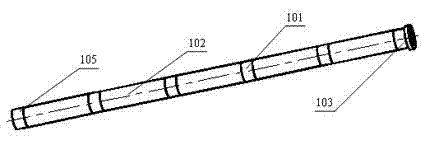
[0026] Such as figure 1 , 2 As shown, the flexible mechanical arm mechanism of the present invention is composed of an inner mandrel 1 , an outer flexible sleeve 2 and a wire bundle 3 . A flexible mechanical arm mechanism driven by a shape memory alloy wire according to the present invention is characterized in that: the bionic flexible mechanical arm mechanism includes an inner mandrel and an outer flexible sleeve; wherein the inner mandrel includes N inner spacers , 3 SMA wires, a base, a top fixing piece and N+1 inner silicone tubes, the inner silicone tube and the inner spacer are arranged at intervals, and the SMA wire passes through the inner spacer and the top fixing piece and is embedded in the inner silicone tube; The outer flexible sleeve includes M outer spac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More