

Teleoperation unmanned submersible for detecting and disposing submarine target
A technology for underwater targets and underwater detection equipment, applied in underwater operation equipment, transportation and packaging, ships, etc., can solve the problems of increased operational difficulty, no retrieval, limited transmission distance and information bandwidth, etc., to achieve convenient disassembly The effect of installation, expansion of application range and improvement of performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
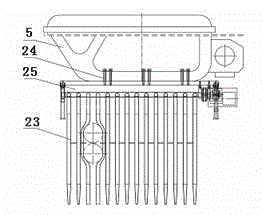
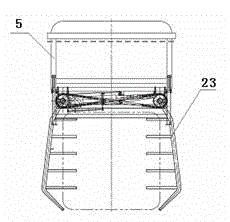
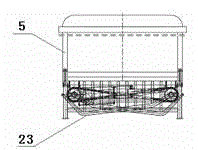
[0040] see figure 1 and figure 2 , a teleoperated unmanned submersible for underwater target detection and disposal, comprising a submersible body frame 5, a buoyancy body 2, a power propulsion device, underwater detection equipment, a power management cabin 4, a communication and control cabin 7, Cable interface and signal interface, buoyancy body 2 and the top of submersible body frame 5 are fixedly combined and installed, power management compartment 4 and communication and control compartment 7 are fixedly loaded on submersible body frame 5, and the cables connected to the cable interface are connected to The power management cabin 4 also provides electric energy to the power propulsion device and the underwater detection equipment, and the signal cable connected with the signal interface is connected to the communication and control cabin 7 and is respectively connected with the power propulsion device and the underwater detection equipment; the power propulsion device i...
Embodiment 2
[0046] This embodiment is basically the same as Embodiment 1, especially in that:
[0047]In this embodiment, the ultra-short baseline positioning sonar transponder 18 is powered by an independent lithium battery. When the photoelectric composite cable of the submersible is disconnected, the signal failure of the communication and control cabin 7 or the submersible causes the submersible to contact with the submersible due to unforeseen extreme conditions When the host computer communication is disconnected, the ultra-short baseline positioning sonar transponder 18 can still work independently to provide the mother ship with search and confirm the location data of the submersible. The ultra-short baseline positioning sonar transponder 18 is powered by an independent lithium battery, and can still work independently for a long time in unforeseen extreme situations such as the disconnection of the submersible composite cable, so as to determine the position of the lost submersibl...
Embodiment 3
[0049] This embodiment is basically the same as Embodiment 1, especially in that:
[0050] In this embodiment, the tilt angle range of the tilt pan head is preferably 60°. The tilting pan / tilt controller 6 can drive the pan / tilt to produce a pitching rotation with a range of 60°, which can realize wide viewing angle detection, adjust the detection and observation angle of the underwater detection equipment, and realize underwater detection without dead angle.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More