Positioning calculating method of global navigation satellite system (GNSS) receiver
A positioning solution and receiver technology, which is applied in the field of satellite navigation, can solve the problems that it is difficult to accurately determine the characteristics of dynamic noise and observation noise, increase the calculation amount and storage capacity of positioning solution, and affect the real-time positioning accuracy. The effect of positioning solution accuracy, improving positioning solution speed, and accelerating convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0018] Below in conjunction with accompanying drawing and specific embodiment, further illustrate the present invention, should be understood that these embodiments are only for illustrating the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various aspects of the present invention Modifications in equivalent forms all fall within the scope defined by the appended claims of this application.
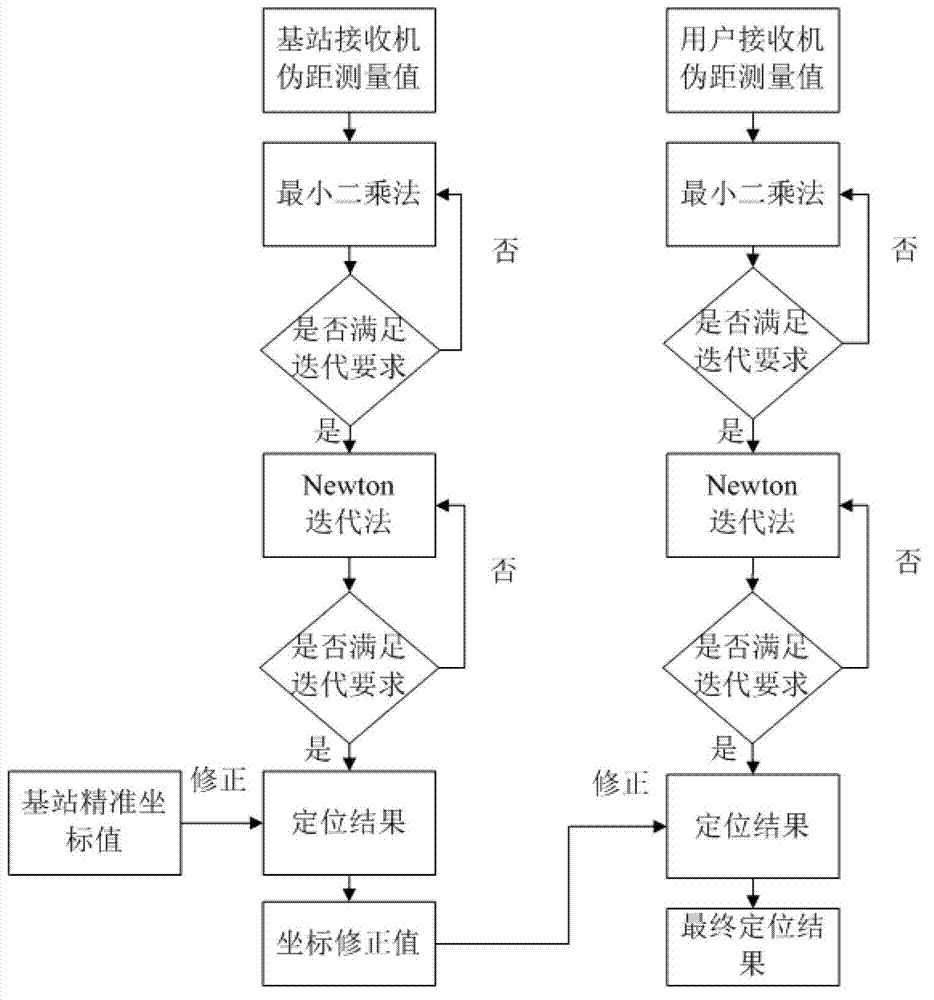
[0019] Such as figure 1 As shown, the location solution method of a kind of GNSS receiver of the present invention comprises the following steps:
[0020] Step 1: The GNSS software receiver (hereinafter referred to as "GNSS receiver" or "receiver") installed on the reference station (referred to as "base station") performs pseudo-range observation on at least 4 navigation satellites, and selects 4 of them From the observation results of navigation satellites, the pseudo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More