

Space manipulator teleoperation instruction safety detection and correction method
A safety detection and manipulator technology, applied in manipulators, program control manipulators, manufacturing tools, etc., can solve problems such as very obvious operator influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
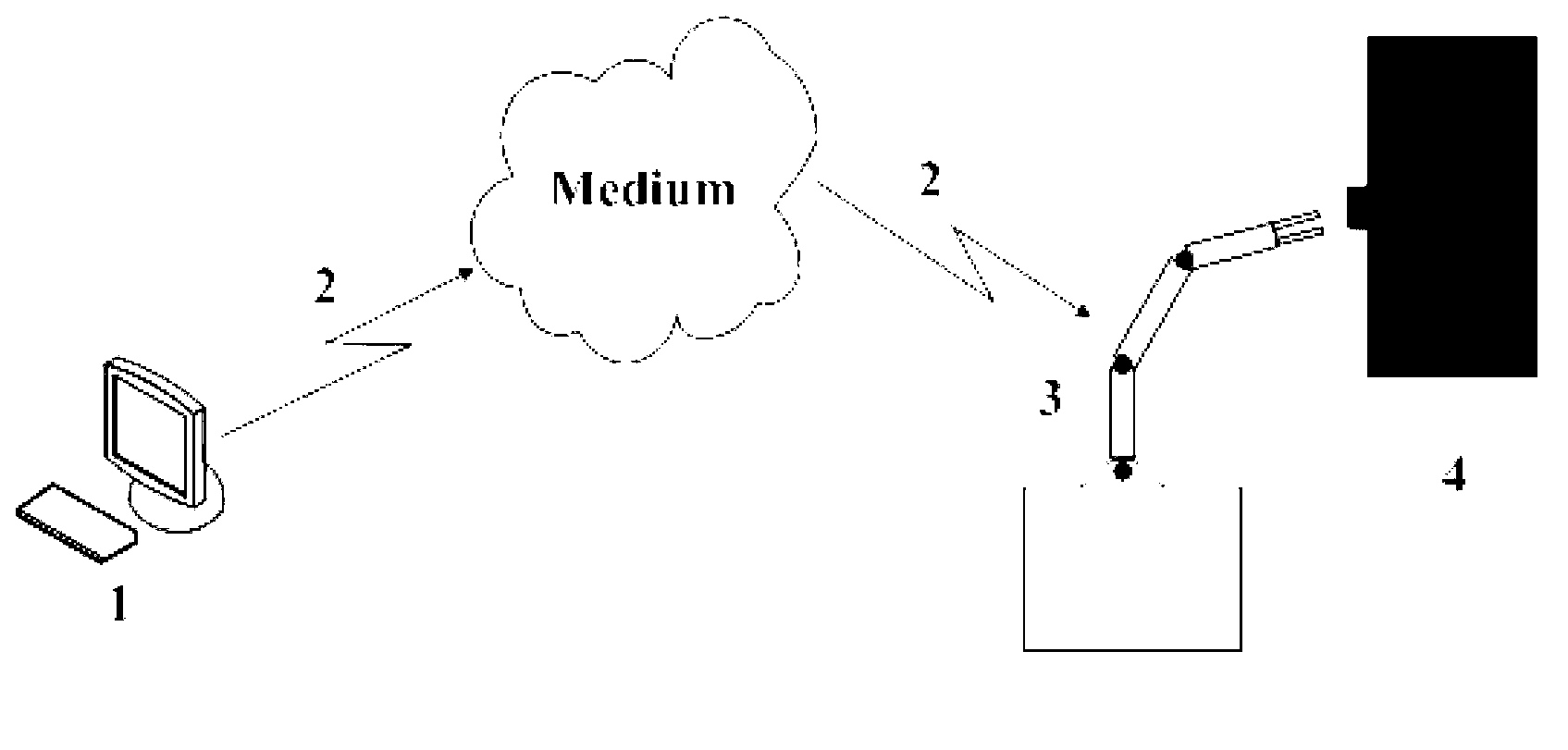
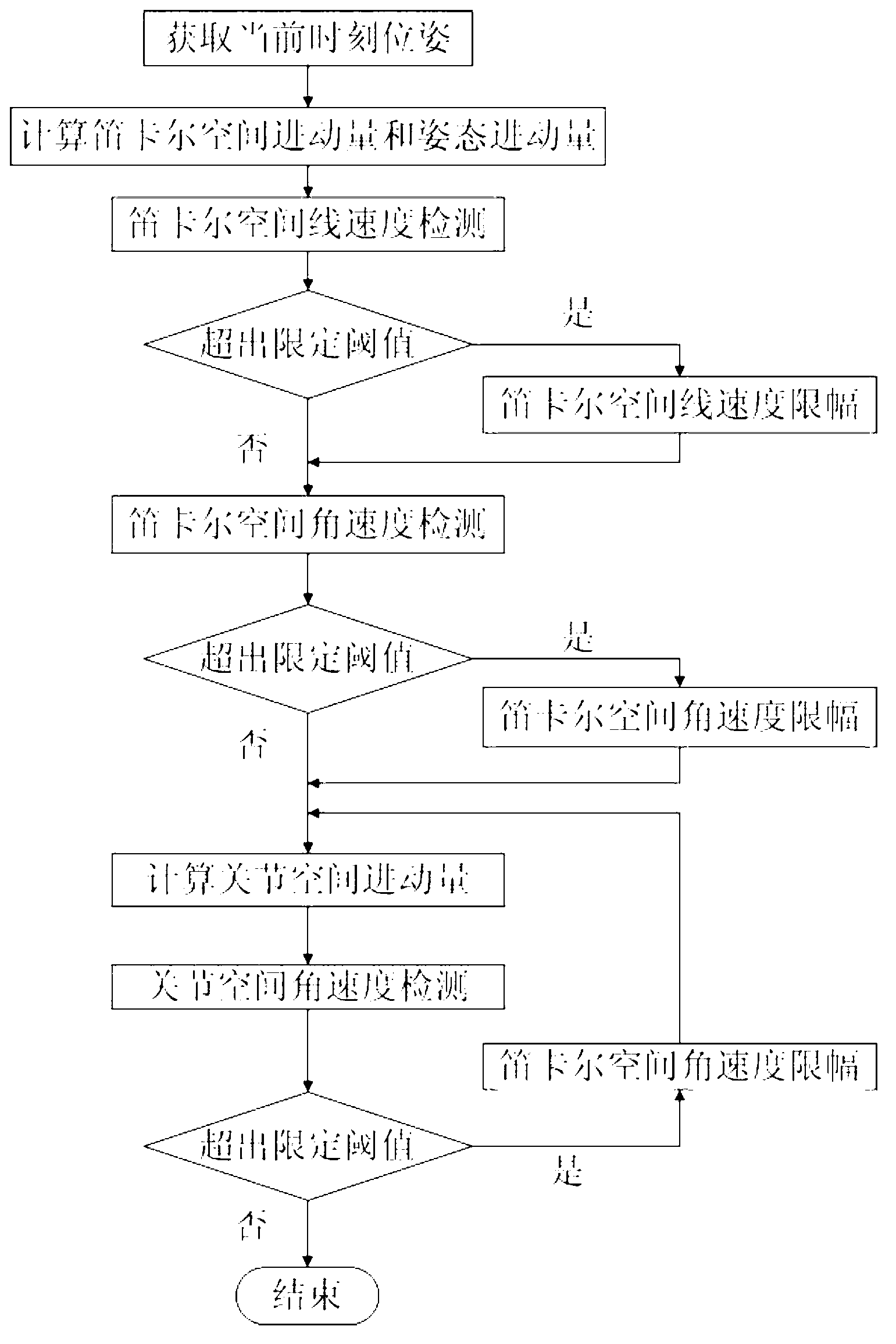
[0035] In the teleoperation system, the movement of the manipulator is driven by sending commands. Among them, there are two kinds of instructions, one is pose instruction, which contains 3 position data and 3 attitude data, and the other is joint angle instruction, which contains 6 joint angle data. The present invention detects the command at the current moment and the command at the previous moment at the sending end in Cartesian space and joint space velocity respectively. If the velocity exceeds the limited threshold, it will be detected again after clipping in Cartesian space until it meets the requirements to generate a safe The command is sent to the remote manipulator.
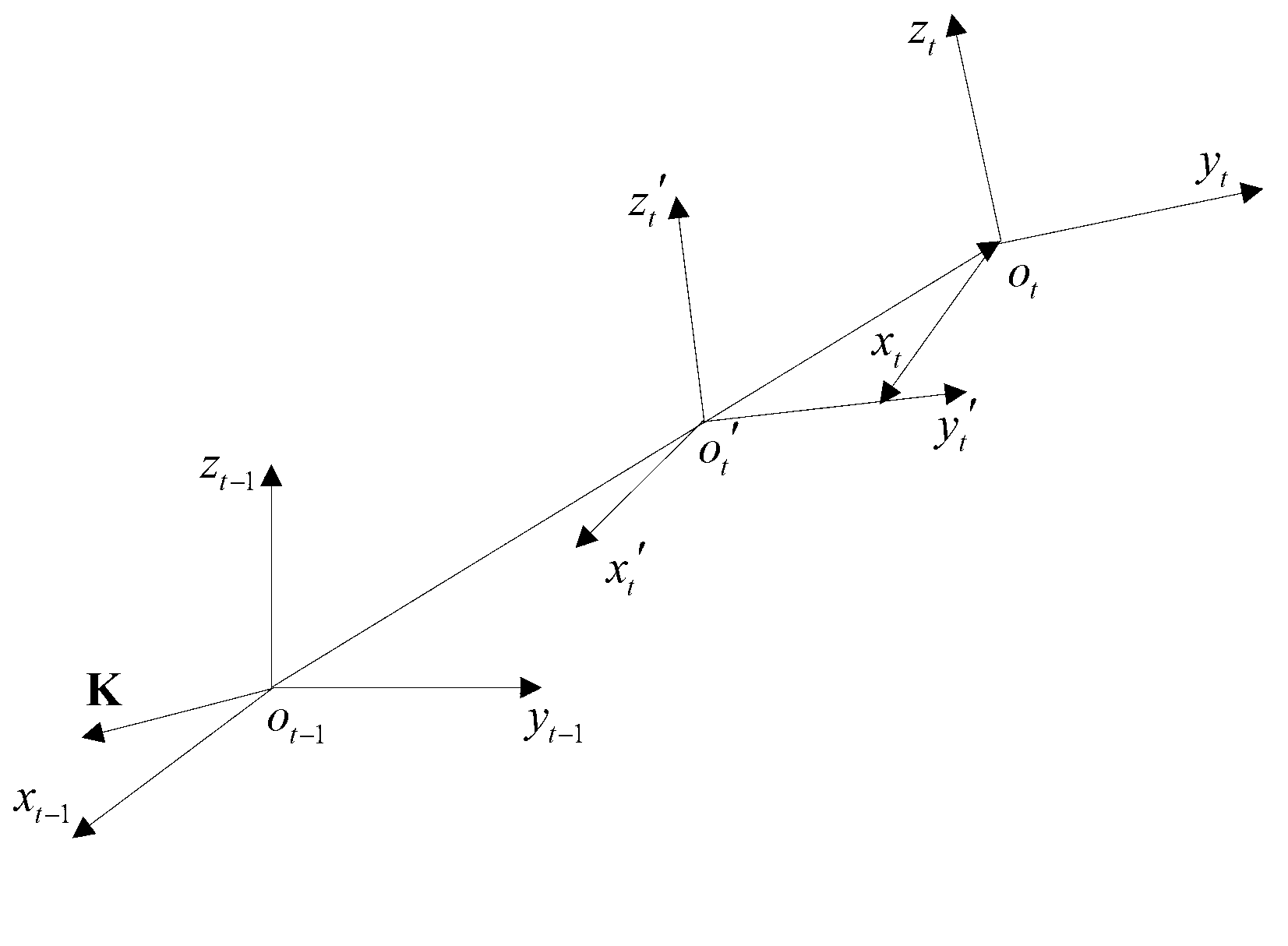
[0036] Step 1: Calculate the Cartesian space position precession and attitude precession
[0037] First get the command at the current moment, if it is a pose command (X t ,Y t Z t ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More