Autonomous navigation and man-machine coordination catching operating system of benthic organism catching robot
A technology of man-machine collaboration and submarine biology, applied in underwater operation equipment, transportation and packaging, ships, etc., can solve the problems of high intelligence requirements, high manufacturing and maintenance costs, and low manufacturing and maintenance costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described below in conjunction with the accompanying drawings.
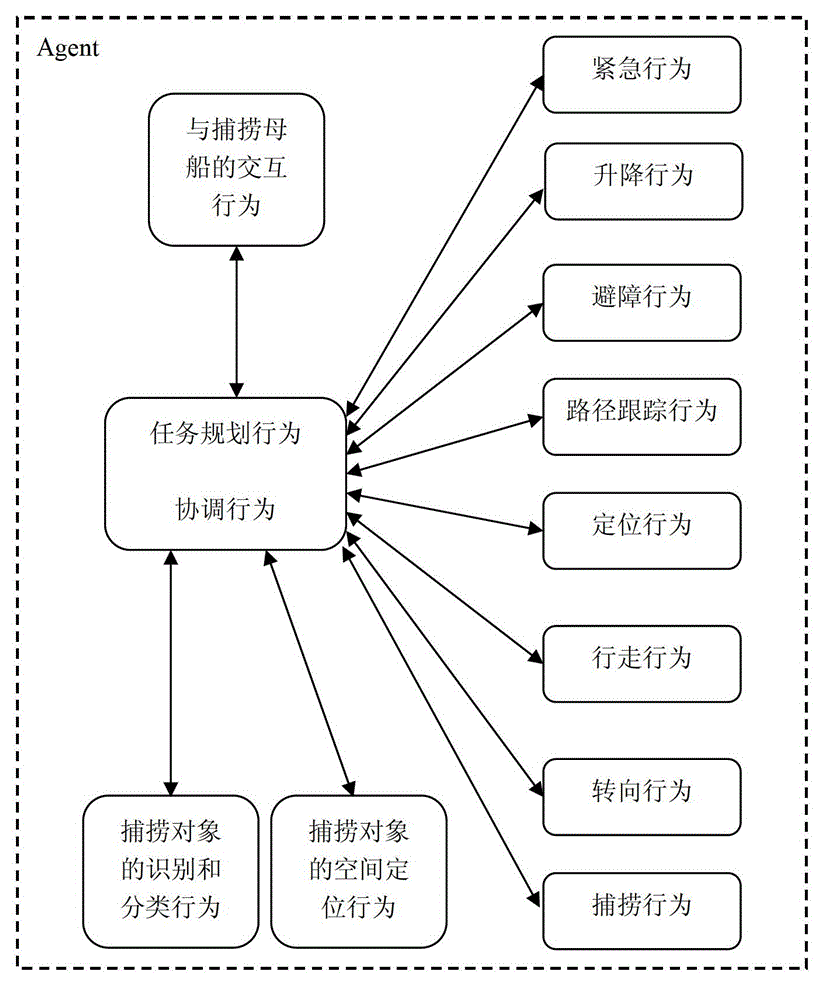
[0064] refer to Figure 1 to Figure 8 , an autonomous navigation and human-machine collaborative fishing operation system for fishing robots, including fishing robots, which are used for comprehensive analysis, processing and judgment of the fishing site and the status of fishing robots, and for fishing management in human-computer collaborative fishing operations Personnel Computers for remote intervention and management, for manual intervention in the event of fishing robots in unusual situations and for fishing management personnel for fishing scheduling planning for fishing robots, for carrying fishing management personnel and collecting and transporting fish The mother ship of the object, the GPS used to locate the spatial position of the mother ship;
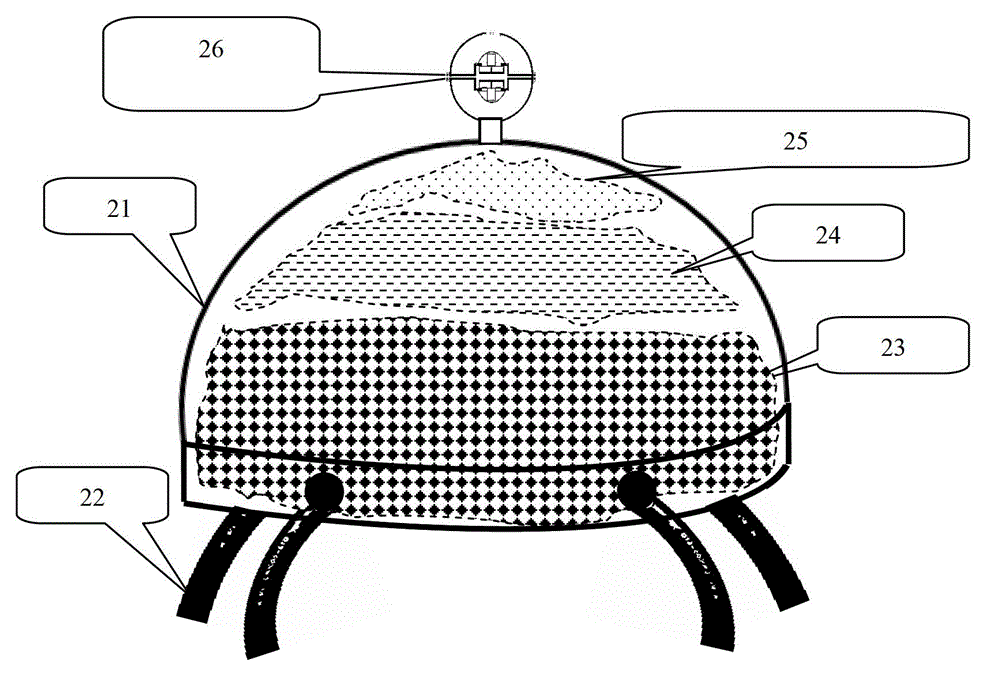
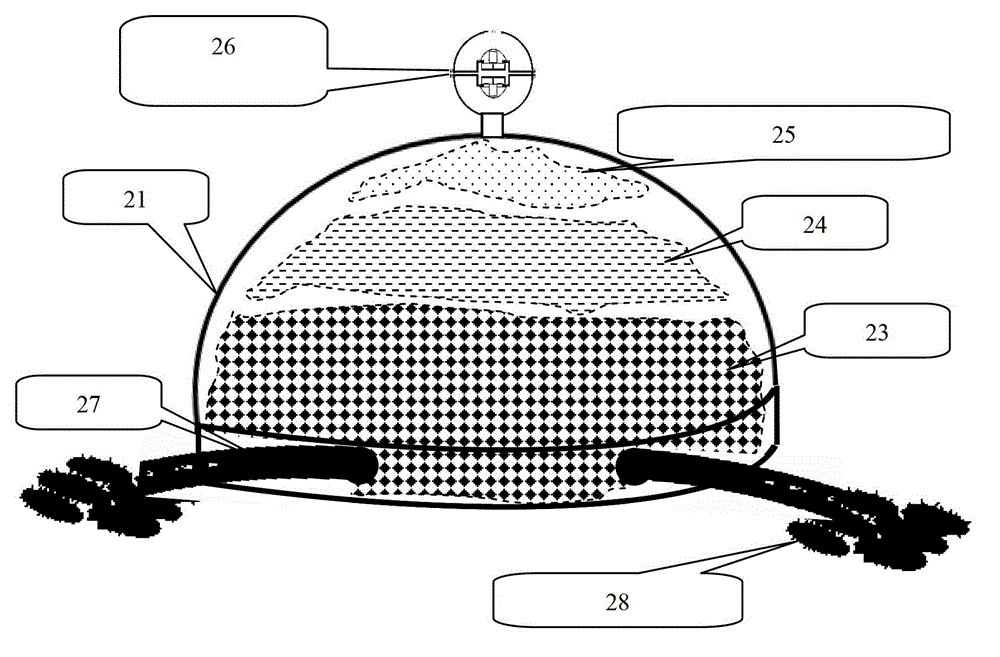
[0065]The fishing robot includes a body of a fishing robot whose external shape is similar to that of a sea tur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More