Resource scheduling method for multiple robots and resource scheduling system thereof
A resource scheduling and multi-robot technology, applied in the direction of resources, resource allocation, multi-programming devices, etc., can solve problems such as low satisfaction, many gain control parameter constraints, and weak ability to deal with uncertain situations. Scientific and reasonable operation, meeting the needs of differentiated scheduling, and improving efficiency and speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention provides a resource scheduling method and resource scheduling system for multi-robots. In order to make the purpose, technical solution and effect of the present invention more clear and definite, the present invention will be further described in detail below. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
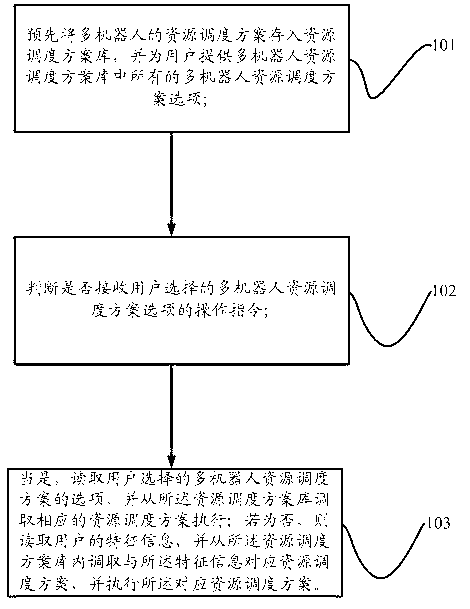
[0038] The present invention provides a resource scheduling method for multi-robots, which first determines whether the user has selected a resource scheduling scheme, and if not, selects the corresponding resource scheduling scheme through user characteristic information, such as figure 1 As shown, it specifically includes the following steps:
[0039]Step 101: Pre-store the multi-robot resource scheduling scheme into the resource scheduling scheme library, and provide the user with all the multi-robot resource scheduling scheme options i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com