

Space rope tying robot camera automatic motion detection and compensation method
A robot camera and space tether technology, applied in the direction of instruments, image data processing, calculation, etc., can solve the unfavorable and difficult problems of automatic detection of moving targets, improve reliability and accuracy, reduce error matching rate, and move Parameter solvers for exact effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
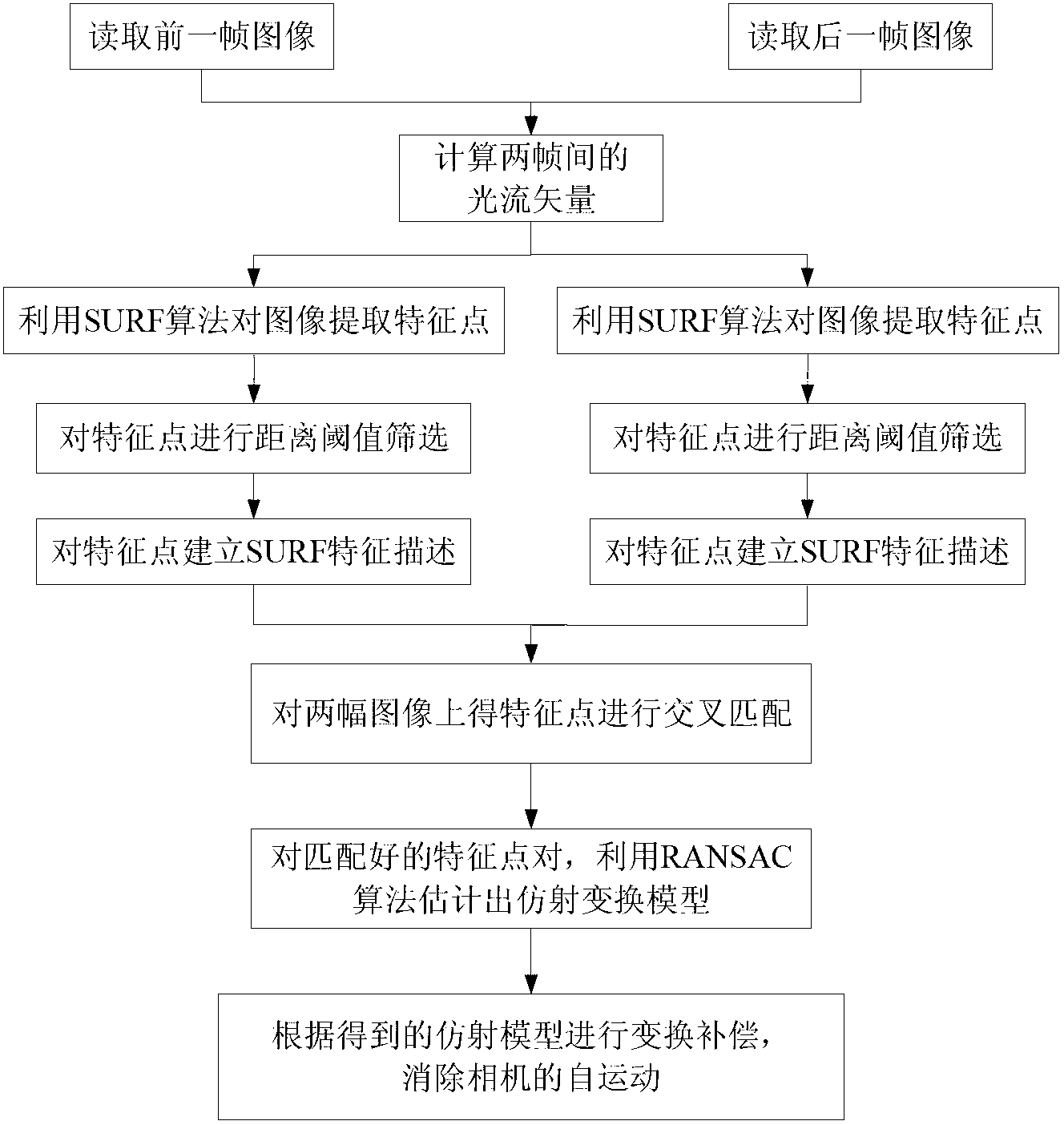
[0022] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0023] Establishing the geometric imaging model of the camera is the basic premise to eliminate the camera's self-motion. Generally speaking, the camera geometric imaging model can be described by the central perspective projection model. In related disciplines such as photogrammetry and computer vision, the perspective projection model has been fully studied, and most algorithms are developed based on the perspective projection model. However, due to the nonlinearity of perspective projection, these algorithms are relatively complex, and the numerical stability of the algorithm is poor, which has been recognized in the field related to image measurement.
[0024] When the internal parameters of the camera do not change during the shooting process and the distance from the shooting area is far away, the field of view is much larger than the scale of the target, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More