Device and method for point cloud optimization
An optimization method and point cloud technology, applied in the field of image processing, can solve problems such as large data scale, inability to maintain sharp features of objects, and difficulty in estimating normal vectors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
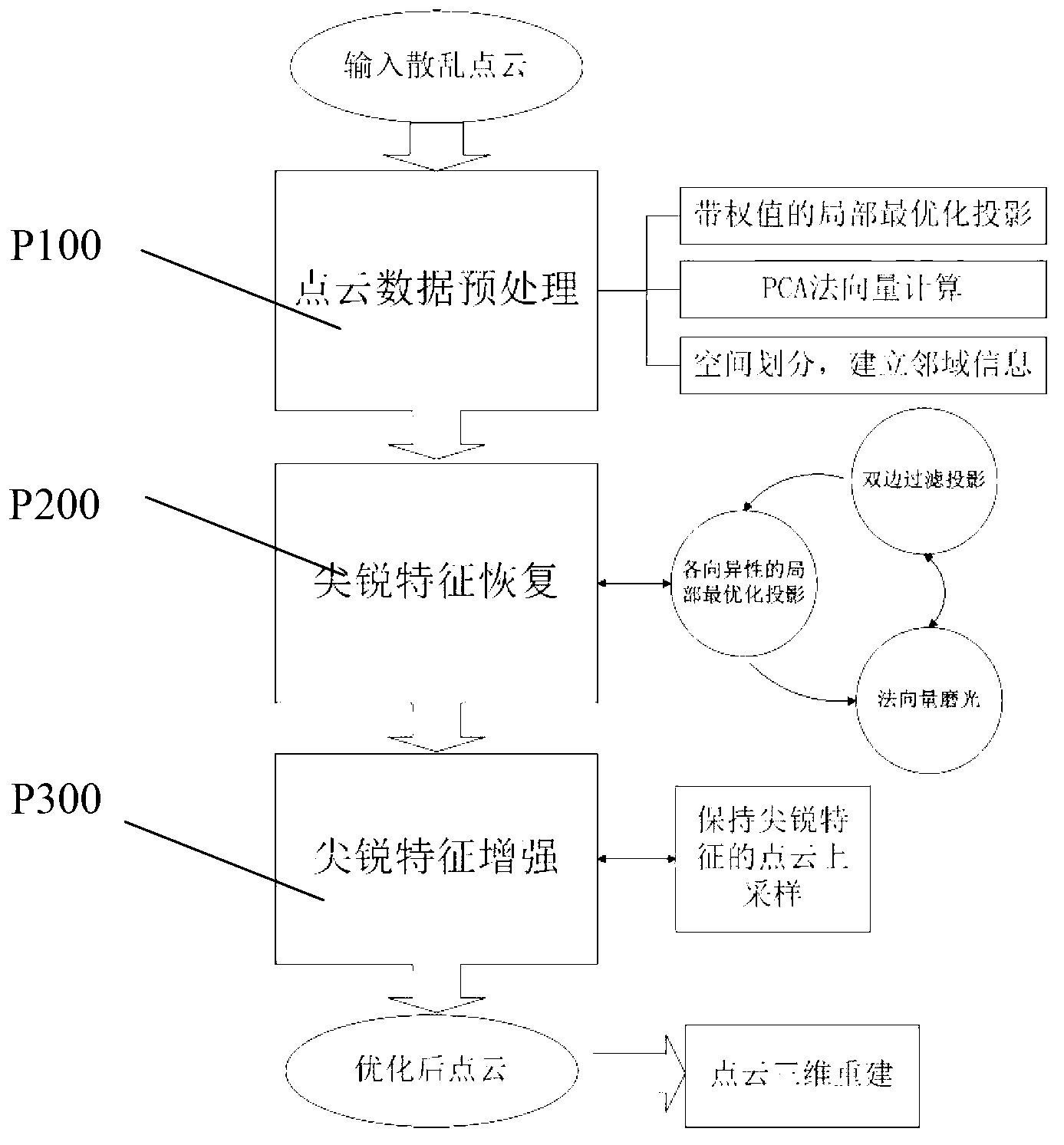
[0108] Such as figure 2 As shown, the point cloud optimization method includes a point cloud data preprocessing step, a point cloud sharp feature restoration step, and a point cloud sharp feature enhancement step. The point cloud data preprocessing step P100 is to use existing methods to streamline large-scale scattered point clouds, denoise, remove external points, homogenize, calculate normal vectors, and partition spatial structure. The point cloud sharp feature restoration step P200 is to restore the sharp feature of the point cloud through further normal vector calculation. The point cloud sharp feature enhancement step is to enhance the sharp feature of the point cloud by up-sampling the sharp feature.
[0109] The specific conditions of these three steps are described in detail below.
[0110] 1. Point cloud data preprocessing steps
[0111] This point cloud data preprocessing step P100 mainly includes three methods: weighted local optimization projection, PCA normal vector...
Embodiment 2
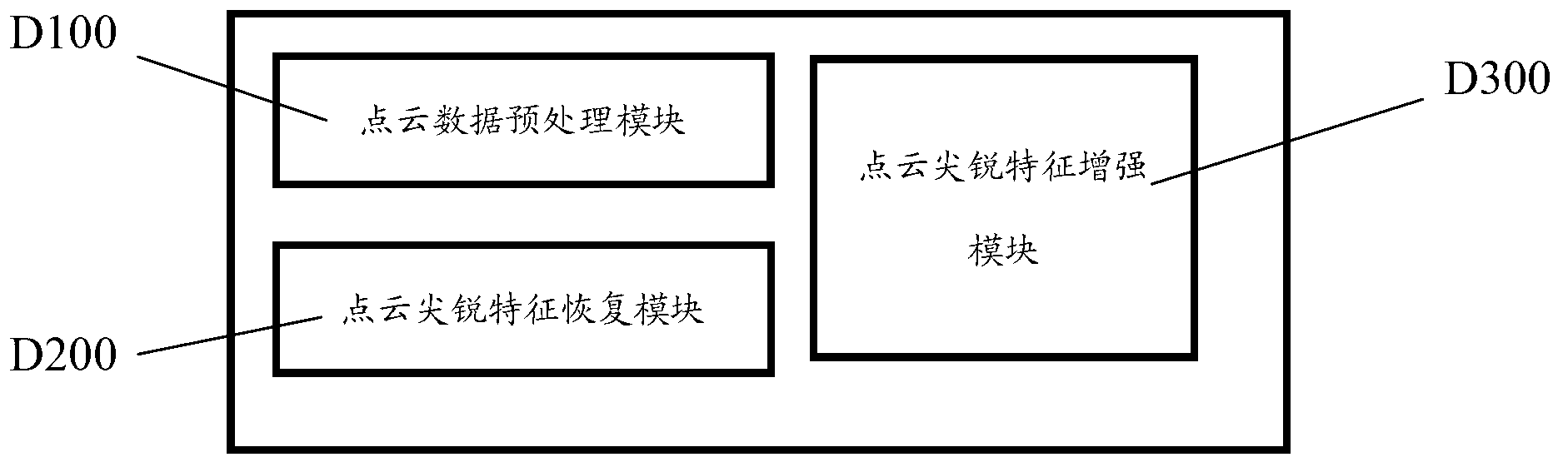
[0227] Such as image 3 As shown, the point cloud optimization device includes a point cloud data preprocessing module, a point cloud sharp feature recovery module, and a point cloud sharp feature enhancement module. The point cloud data preprocessing module D100 uses existing methods to streamline large-scale scattered point clouds, denoise, remove external points, homogenize, calculate normal vectors, and partition spatial structure. The point cloud sharp feature recovery module D200 recovers the sharp features of the point cloud through further normal vector calculation. The point cloud sharp feature enhancement module D300 enhances the sharp features of the point cloud by up-sampling the sharp features.
[0228] The specific conditions of these three modules are described below.
[0229] 1. Point cloud data preprocessing module
[0230] The point cloud data pre-processing module D100 mainly includes three methods: weighted local optimization projection, PCA normal vector calcul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More