

Two-foot robot track generating and modulating method based on certified program generator (CPG) mechanism
A biped robot, trajectory generation technology, applied in two-dimensional position/channel control, instrument, adaptive control, etc., can solve problems such as increasing engineering complexity, difficult design, and unfavorable robot engineering applications.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
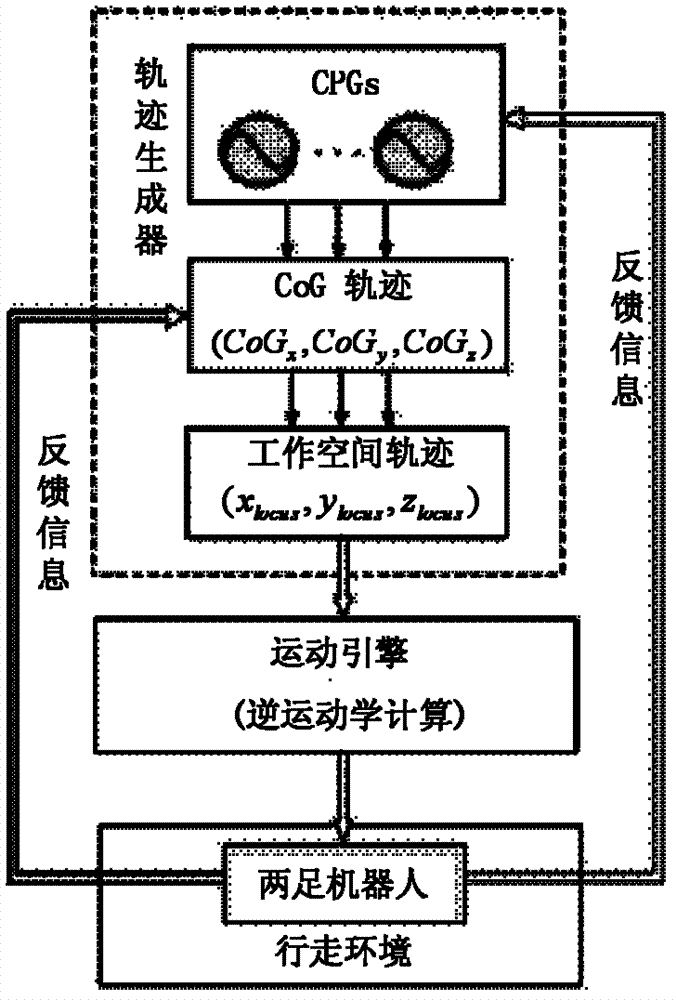
[0032] The invention utilizes the CPG to control the variable with periodical variation law and can reflect the motion characteristics of the robot in the motion process of the robot, and utilizes the external feedback information to directly affect the variable to generate a new state with environmental adaptability. The stability of walking is extremely important for biped robots, so the present invention uses CPG to generate the control idea of the trajectory of the center of gravity of the robot online. That is to use the rich dynamic characteristics of CPG to generate the trajectory of the robot's center of gravity in real time, and further use the generated trajectory of the center of gravity to plan the trajectory of the robot's workspace online. In this way, the stride span, the height of the leg lift and the walking speed of the robot are adjusted to achieve the purpose of adaptive walking.
[0033] The present invention generates the trajectory of the center of gra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More