

Dynamic positioning simulation test platform and position control method
A test platform and dynamic positioning technology, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as the inability to ship simulation tests, the platform is not six degrees of freedom, and the six degrees of freedom movement and control of ships cannot be simulated.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention is described in more detail below in conjunction with accompanying drawing:
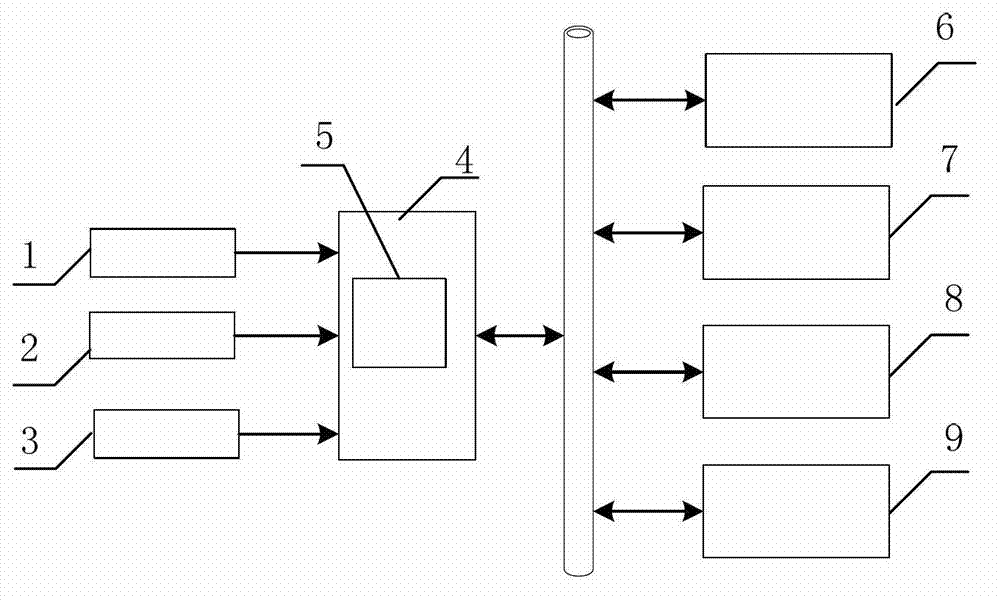
[0025] combine figure 1 , the present invention includes a ship motion simulation computer 7, a three-degree-of-freedom horizontal motion platform 8, a four-degree-of-freedom motion turntable 9, a data processing computer 4, a data fusion algorithm 5, an integrated display and control computer 6, a compass 1, GPS2 and MRU3. Among them, the data processing computer 4, the comprehensive display and control computer 6, the ship motion simulation computer 7, the three-degree-of-freedom horizontal motion platform 8 and the four-degree-of-freedom motion turntable 9 are connected into a local area network through Ethernet. The data fusion algorithm 5 is loaded into the data processing computer 4 . The data processing computer 4 and the four-degree-of-freedom motion turntable 9 are installed on the three-degree-of-freedom horizontal motion platform 8 . The compass 1, GPS2 and M...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More