Discrete limited variable-speed input multiple-freedom-degree controllable mechanism type excavator
A variable speed input and degree of freedom technology, applied to mechanically driven excavators/dredgers, etc., can solve the problems of being vulnerable to power supply restrictions, oil leakage, and high machining accuracy requirements of hydraulic systems, so as to overcome power supply restrictions and reduce manufacturing costs. cost, ease of maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions of the present invention will be further described below through the accompanying drawings and embodiments.
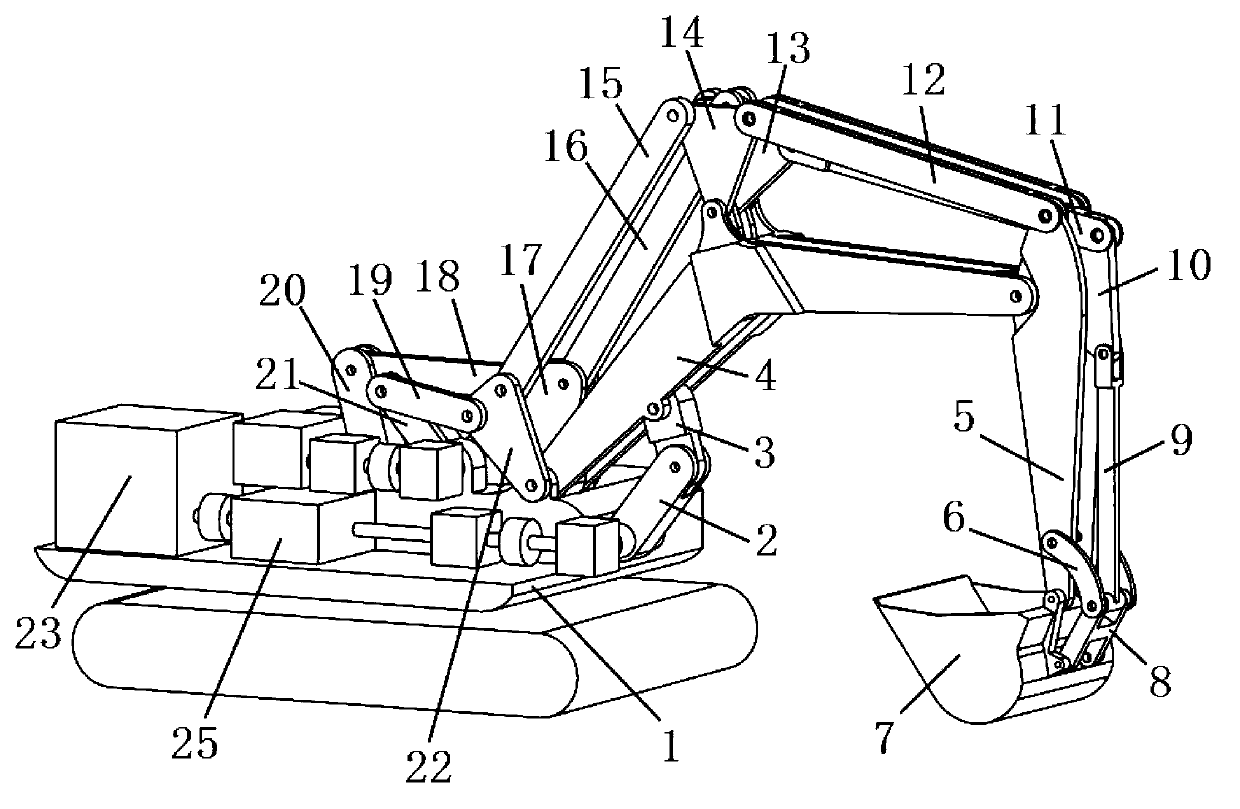
[0028] control figure 1 , the discrete limited variable speed input multi-degree-of-freedom mechanism excavator of the present invention includes a frame 1, a boom lifting branch chain, an arm swing branch chain, a bucket turning branch chain, a bucket 7, an internal combustion engine 23 and a transmission device .
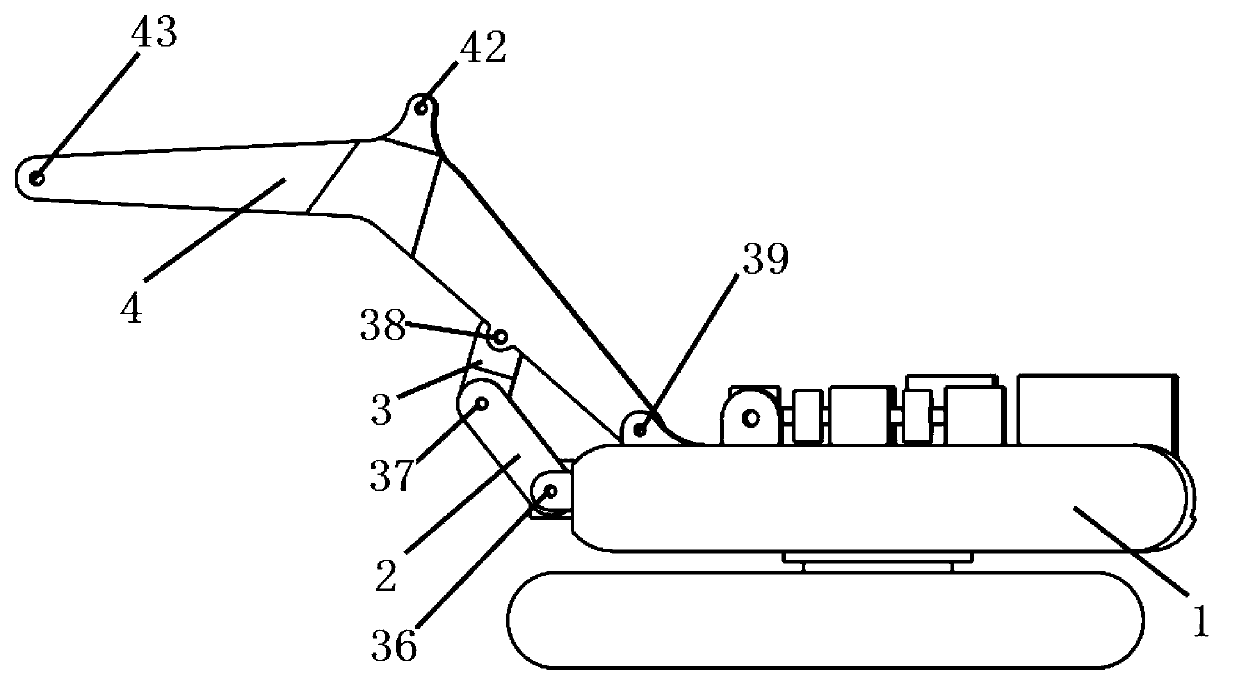
[0029] control figure 1 and figure 2 , the boom lifting branch chain is composed of the boom 4, the first active rod 2, and the first connecting rod 3, the boom 4 is connected with the frame 1 through the first rotating pair 39, and the first active rod 2 One end is connected to the frame 1 through the second rotating pair 36 , the other end is connected to the first connecting rod 3 through the third rotating pair 37 , and the first connecting rod 3 is connected to the boom 4 through the fourth rotating pair 38 .
[003...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com