

Mixed joint continuous robot
A continuous, robotic technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effect of expanding movement space and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in more detail below with examples in conjunction with the accompanying drawings.
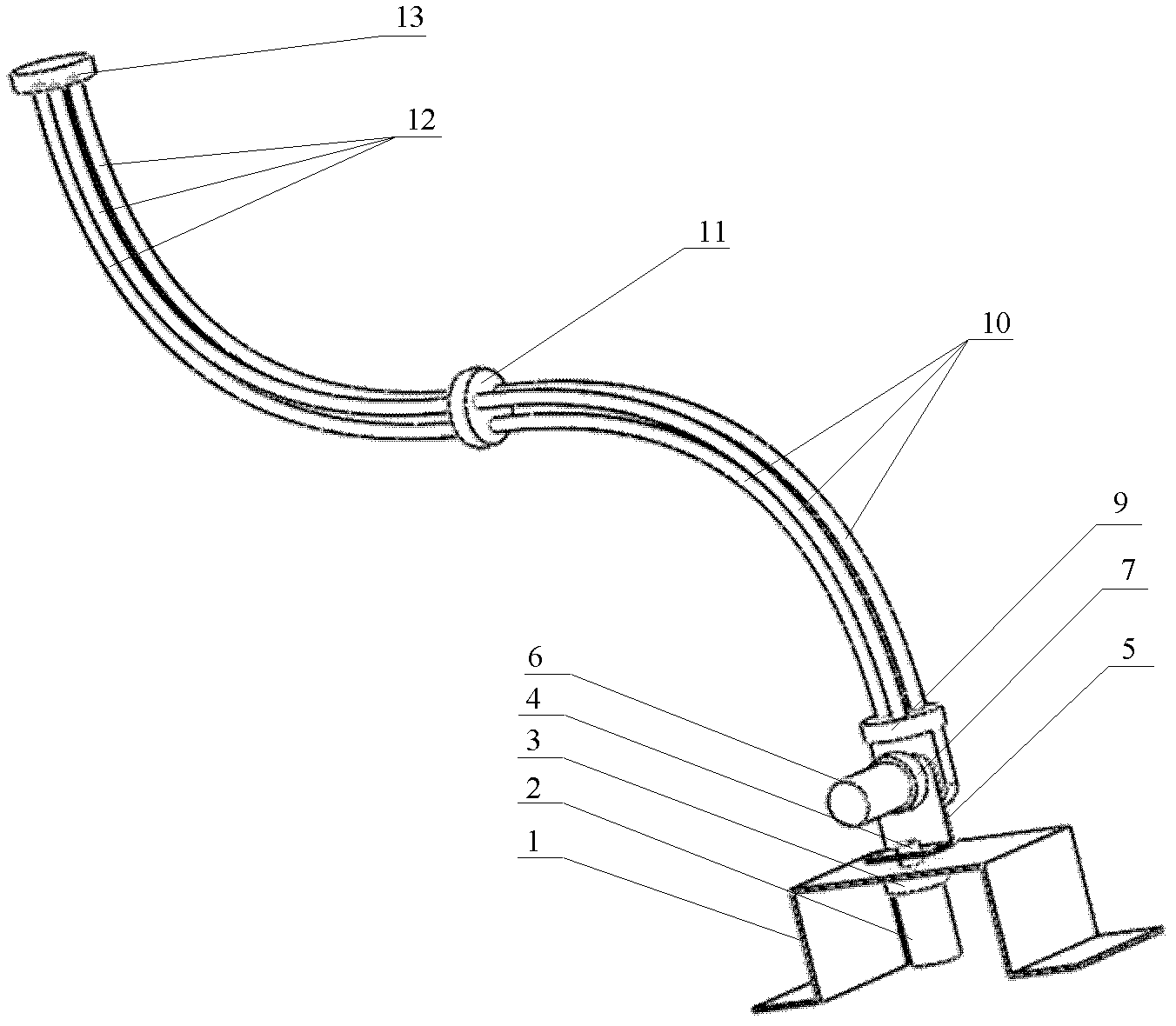
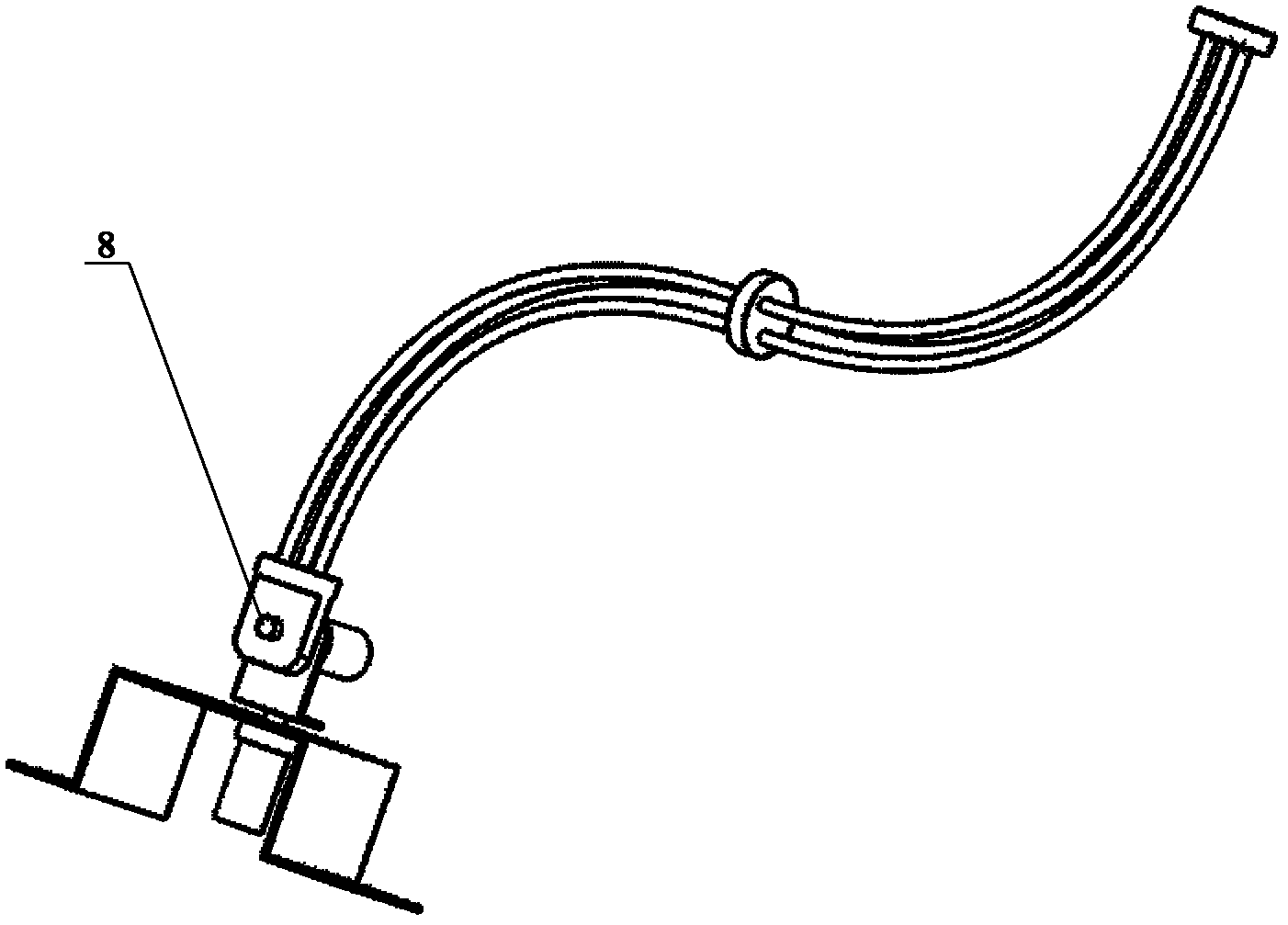
[0019] figure 1 with figure 2 It is a structural schematic diagram of a hybrid joint continuous robot. The robot is composed of four joints installed on the base 1 in series. The four joints include two rotary joints and two continuous joints. The connection sequence is the first rotary joint, the second Second-level rotary joints, first-level continuous joints 10, and second-level continuous joints 12. The first-stage rotary joint is composed of a motor 2 and a reducer 3, and the second-stage rotary joint is composed of a motor 6 and a reducer 7, wherein the motor 2 and the motor 6 are used as driving components, and the motor 2 and the motor 6 are respectively passed through the reducer 3 and the reducer. The machine 7 outputs the rotary motion, which drives the adjacent joints of the next stage to rotate.
[0020] The first-level continuous ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More