

Method, device and system for obtaining vehicle three-dimensional outline
A three-dimensional profile and vehicle technology, applied in the field of measurement, can solve the problems of poor reliability, poor stability, small measurement range, etc., and achieve the effect of good stability, good reliability and simple algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
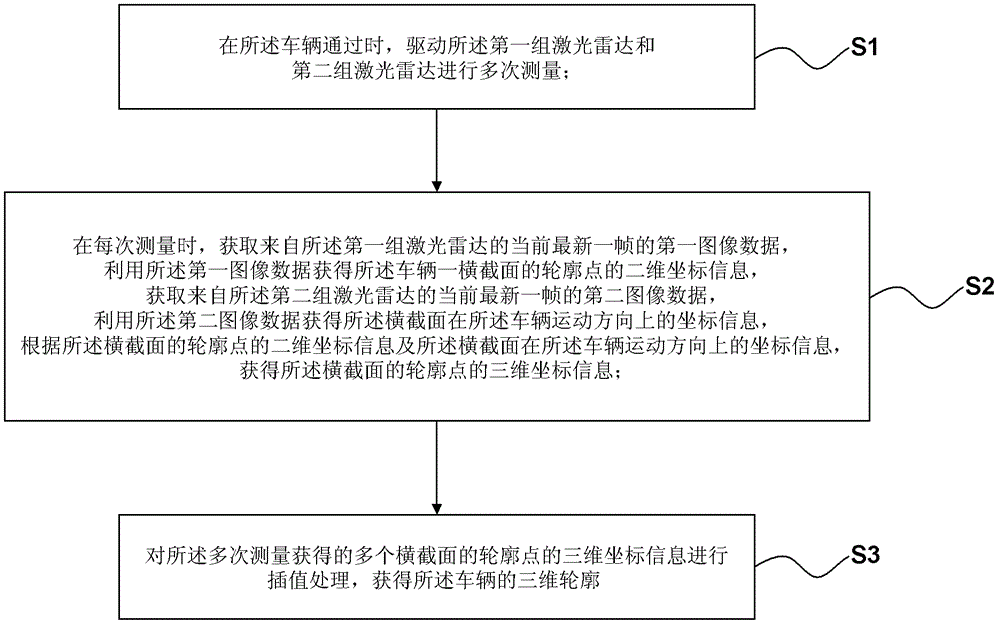
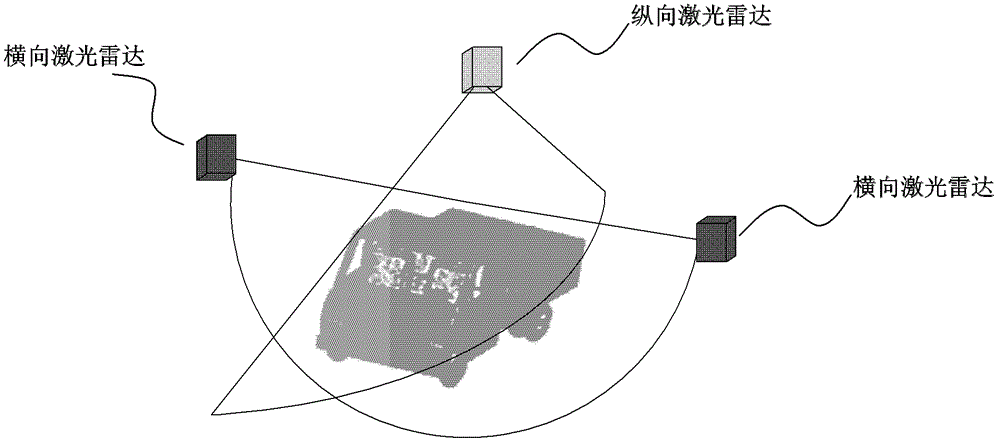
[0062] figure 1 It is a flow chart of the method in Embodiment 1 of the present invention, which is used in a system including a first group of laser radars and a second group of laser radars, wherein the first group of laser radars and the second group of laser radars are two-dimensional lasers The scanning surface of the first group of laser radars is perpendicular to the moving direction of the vehicle, and the scanning surface of the second group of laser radars is parallel to the moving direction of the vehicle.
[0063] The lidars in the first set of lidars may be referred to as lateral lidars, and the lidars in the second set of lidars may be referred to as longitudinal lidars. In this embodiment, both the horizontal laser radar and the vertical laser radar are two-dimensional laser radars. The two-dimensional laser radar emits a linear laser beam and uses high-frequency rotation to form a scanning surface. The reflection of the laser radar to obtain the position infor...
Embodiment 2
[0084] Figure 5 is a schematic diagram of the device in Embodiment 2, for a system including the first group of laser radars and the second group of laser radars, wherein
[0085] Both the first set of lidars and the second set of lidars are two-dimensional lidars, and
[0086] The scanning surface of the first group of laser radars is perpendicular to the moving direction of the vehicle, and the scanning surface of the second group of laser radars is parallel to the moving direction of the vehicle;
[0087] The devices include:
[0088] A control unit 501: used to drive the first group of laser radars and the second group of laser radars to perform multiple measurements when the vehicle passes by;
[0089] Lateral coordinate acquisition unit 502: used to drive the first group of laser radars to perform multiple measurements when the vehicle passes by, and acquire the first frame of the current latest frame from the first group of laser radars for each measurement. Image d...
Embodiment 3
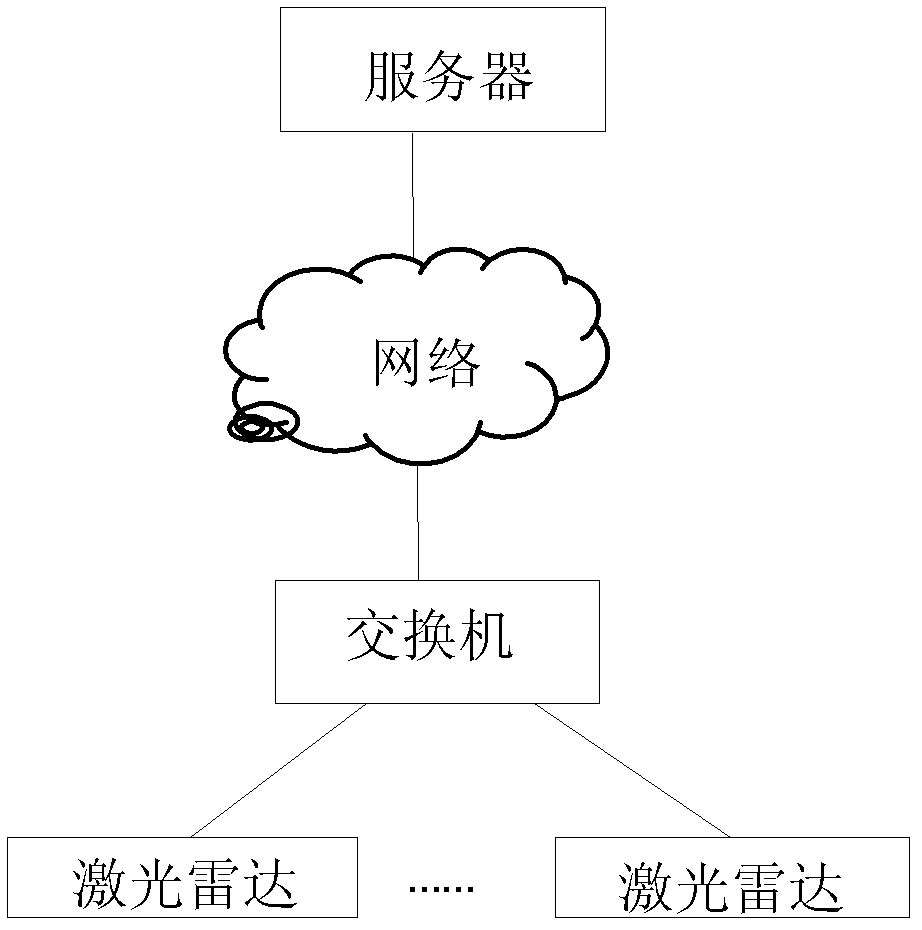
[0106] Figure 6 It is a schematic diagram of the system in Embodiment 3 of the present invention, including:
[0107] The first group of laser radar 601: it is a two-dimensional laser radar, and its scanning surface is perpendicular to the moving direction of the vehicle;
[0108] The second group of laser radar 602: it is a two-dimensional laser radar, and its scanning surface is parallel to the moving direction of the vehicle;
[0109] Processor 603: configured to drive the first group of laser radars and the second group of laser radars to perform multiple measurements when the vehicle passes by; drive the first group of laser radars to perform multiple measurements when the vehicle passes by, At each measurement, the first image data of the current latest frame from the first group of laser radars is obtained, and the two-dimensional coordinate information of the contour points of a cross section of the vehicle is obtained by using the first image data; When the vehicle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More