Three-degree of freedom joint driven by electromagnetic force applied to snake-shaped robot
A snake-shaped robot, electromagnetic force technology, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve the problems of complex mechanical structure, inflexible movements, low wear life and other problems, and achieve simplified mechanical structure, simple turning and climbing, and low cost. low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The present invention will be further described in detail with reference to the accompanying drawings.
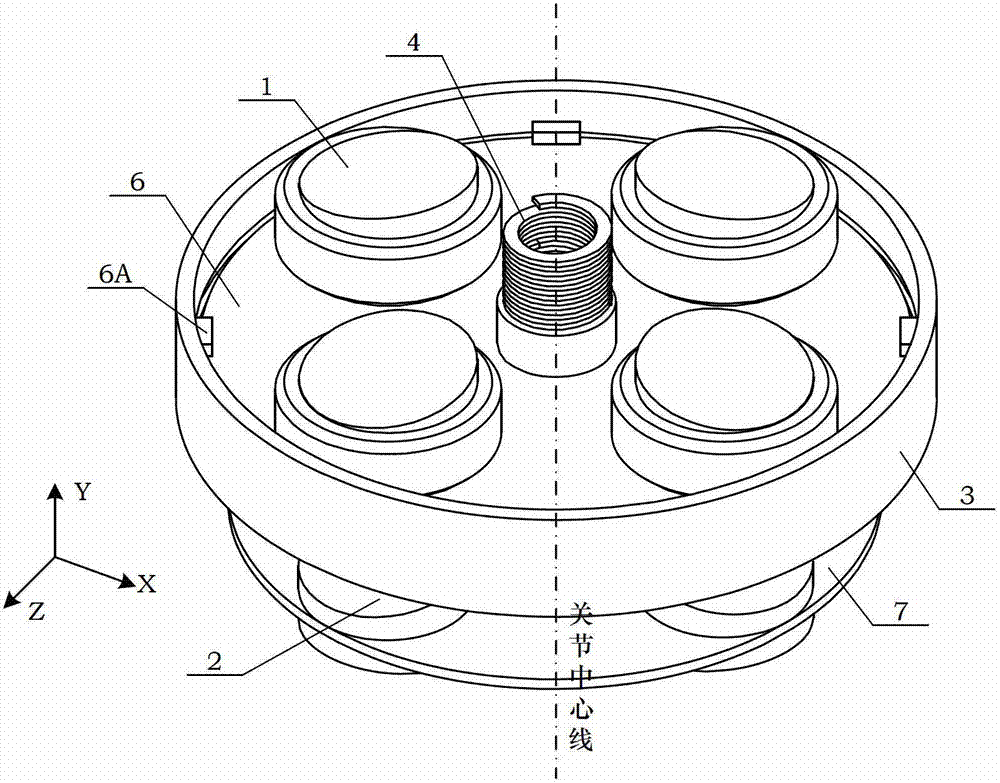
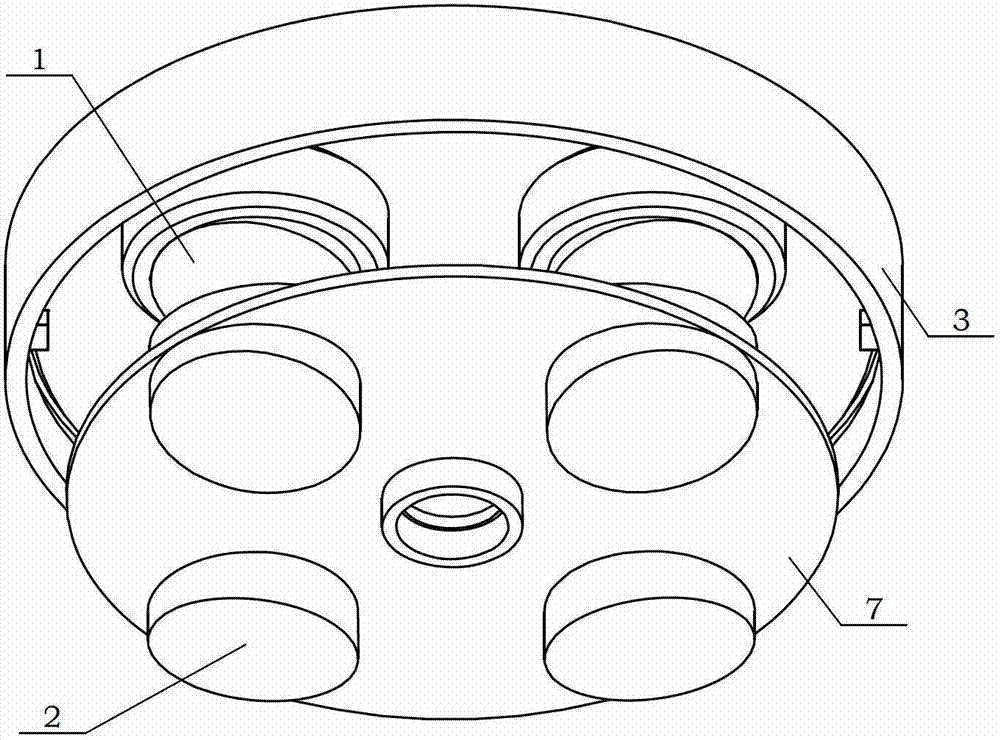
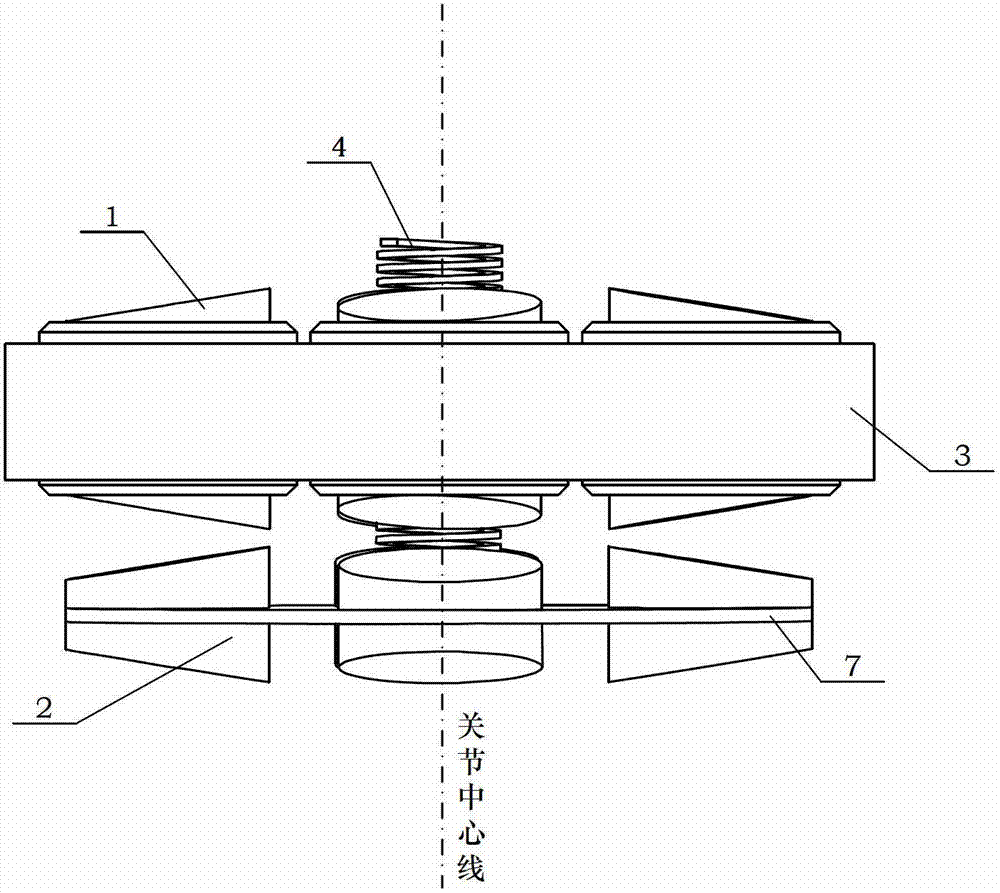
[0068] See figure 1 , Figure 1A , Figure 1B , Figure 1C , Figure 1D As shown, an electromagnetic force-driven three-degree-of-freedom snake robot joint of the present invention includes an electromagnet group 1, a permanent magnet group 2, a tactile detection ring 3, a thrust spring 4, a spring support seat 5, and a contact type Switch mounting plate 6 and bracket 7. The thrust spring 4 is placed in the spring support base 5, the electromagnet group 1 and the spring support base 5 are mounted on the contact switch mounting plate 6, the tactile detection ring 3 is mounted on the outside of the contact switch mounting plate 6, and the permanent magnet group 2 is mounted On the stand 7. The rolling motion of the joint mechanism designed in the present invention around the Y axis is called the first degree of freedom motion, the extension or contraction motion along th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com