

Reference sphere positioning and measuring method based on line-structured light vision sensor
A visual sensor and line structured light technology, applied in the field of precision measurement, can solve the problems of lack of reference ball positioning measurement method, large positioning error, and joint length change
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The method for realizing reference ball positioning measurement based on the line structured light vision sensor comprises the following steps:
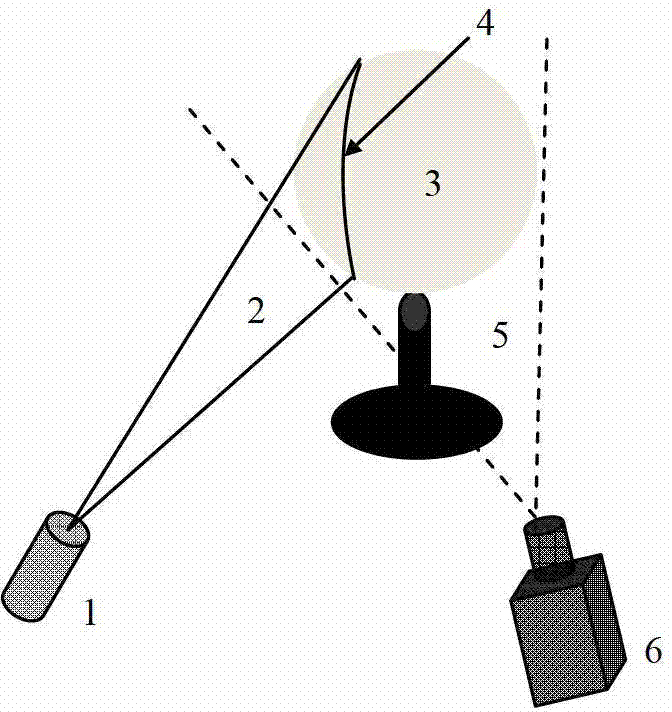
[0039] On the premise of meeting the working distance of the line structured light vision sensor and measuring the depth of field, fix the reference sphere to be measured in the sensor field of view, and project the structured light plane onto the reference sphere, and intersect with the reference sphere to form an arc-shaped light strip;
[0040] Collect the arc light stripe image modulated by the reference sphere, and extract the light stripe;
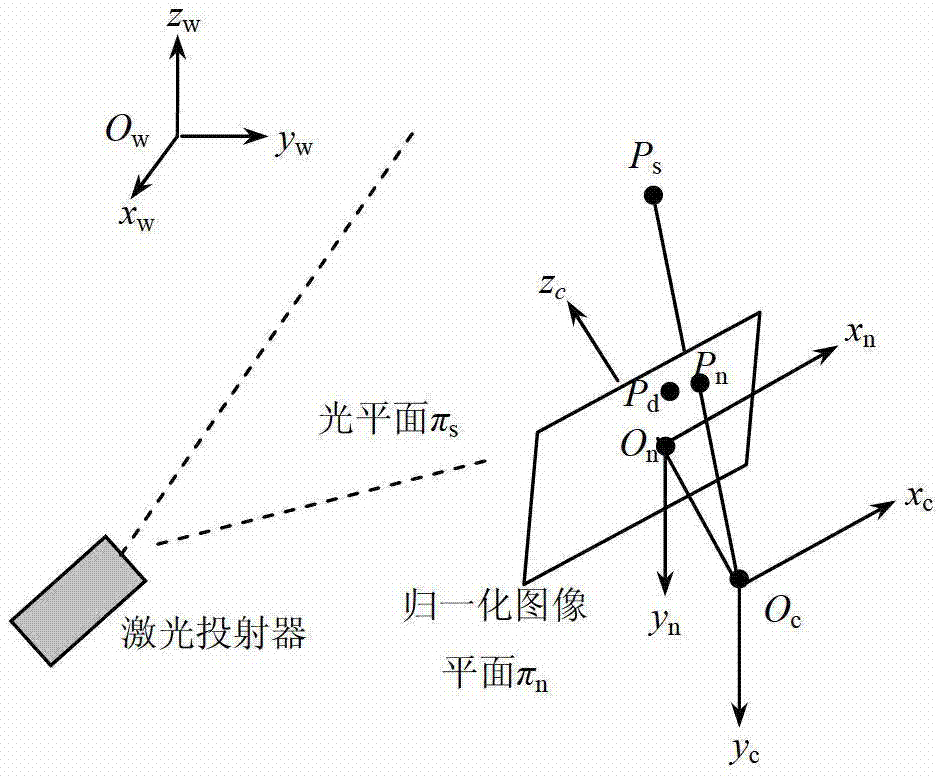
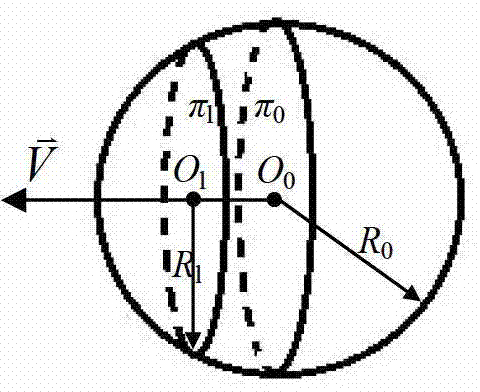
[0041] According to the measurement model of the line structured light vision sensor, the three-dimensional coordinates of the arc light strip are calculated, the space intersecting section circle is fitted, and the center of the section circle is determined. l and its radius R l ;
[0042] Determine the normal vector of the structured light plane according to the calibration param...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More